
三菱FX2N系列PLC在注塑机全自动控制系统中的应用
发布时间:2017-08-30作者:Doris
0 引言
注塑机是一种用于塑料产品生产、加工的机械,是塑料生产行业大量使用的设备。注塑机原理与打针用的注射器相似,它是借助螺杆(或柱塞)的推力,将已塑化好的熔融状态(即粘流态)的塑料注射入闭合好的模腔内,即通过喷嘴注入模具型腔,经冷却固化定型后取得制品的工艺过程。注射成型是一个循环的过程,每一周期主要包括:定量加料—熔融塑化一施压注射一充模冷却一启模取件等等。取出塑件后又再闭模,进行下一个循环。
1 系统要求
1.1 系统结构及主要参数
注塑机系统由两台电动机直接驱动。M1是合开模具电动机,控制模具型腔的打开与闭合,采用双速三相鼠笼异步电动机,基本参数:PN=2.2kW,UN=380V,IN=5A;采用双速电动机,低速是三角形接法,高速是双星形接法。M2是注塑电动机,控制注塑杆的前进与后退,采用双速三相鼠笼异步电动机,基本参数:PN=4.5kW,UN=380V,IN=9A;停车时,均采电磁离合器制动。工厂电网电压等级UN=380V。系统结构如图1所示。

图1注塑机结构示意图
1.2 PLC控制要求
用三菱FX2N系列PLC控制实现注塑加工的全自动功能过程,该全自动控制系统用一只启动开关进行控制:由人工按下起动开关发出启动命令后,首先启动模具电动机正转M1进行高速正转合模,合模结束后,压SQ2位置开关,Ml电动机低速正转合模,延时2S后,电磁离合器制动3S,注塑电动机M2高速正转起动,注塑杆快进,压SQ4,M2电动机低速前进进行注塑挤压延时10S,注塑挤压结束,M12电磁离合器制动停车延时3s,M2反转注塑杆快退压SQ3,M2慢退且电磁离合器制动停车,延时30S进行保模,Ml高速反转开模,压SQI,M1电磁离合器制动停车,3s后取下注塑产品,再经过5s又自动开始下一周期的工作。如此周而复始进行工作,直到打开开关,完成当前周期工作后,注料杆、右模返回到原始位置,才能停止工作。
2 系统的硬件设计
2.1 主电路图
根据系统全自动控制的要求,设计的主电路如图2。

图2注塑机控制主电路图
2.2 I/O分配(图3)

图3 I/O分配图
3 系统软件设计
3.1 状态转移图
注塑机全自动控制的过程是一个典型的顺序控制,利用顺序步进指令进行设计,设计的状态转移图如图4所示。

图4注塑机全自动控制的状态转移图
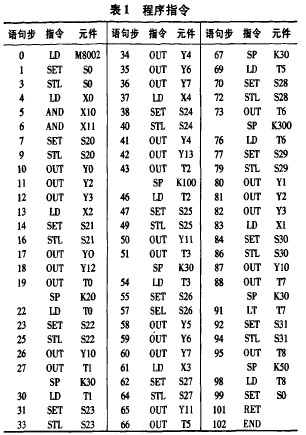
3.2自动状态程序指令
根据图4的状态转移图写出程序指令(表1)。
4 PLC控制的注塑机全自动控制程序的调试
起动PLC,按下开关SA,则XO得电,PLC输出Y0,Y2,Y3,使与之对应的继电器线圈得电,主触点闭合,控制开合模电机的高速合模,后撞到左限位开关SQ2使X2闭合,PLC输出YO,Y12控制电动机的低速合模,s后,Y10输出使KM11得电动作,触点闭合使得YC1得电,电磁离合器抱闸制动3s后,Y4,Y6,Y7输出控制注塑杆快速下降后撞到下限位开关SQ4使X4闭合,PLC输出YS,Yl3,控制注甥杆的低速下降并注塑挤压10s后Y11输出使KMl2得电动作,常开触点闭合使YC2得电,电磁离合器抱闸制动3s,延时3s,PLc输出Y5,Y6,Y7,控制注塑杆的快速上升后撞到上限位开关SQ3,使)(3闭合PLC输出Y11,使KMl2得电动作,常开触点闭合使Yc2得电电磁离合器YC2抱闸制动3s,注塑产品保模30s,PLC输出Y1,Y2,Y3控制注塑机高速开模,后撞到右限位开关SQI使X1闭合YIO输出使KM11得电动作,触点闭合使得YCl得电,电磁离合器抱闸制动3s后再过5s进入下一周期。如此循环,直到断开SA开关完成正在工作的那个周期停下。
5 结语
以上就是根据注塑机控制系统的要求,利用三菱FX2N系列PLC的顺序控制指令进行全自动控制系统的硬件和软件设计,设计了系统的状态转移图,编写了程序并进行调试。利用顺序控制指令进行PLC设计方法简单,思路清晰,程序可读性好,程序修改方便。同时只要对系统的硬件和软件进行少量的修改,就能完成注塑机的全自动、半自动、手动、单步、回原点等等更复杂的多种控制方式的PLC程序设计。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司