
PLC在电镀专用行车控制中的应用
发布时间:2017-09-02作者:Doris
可编程控制器是70年代以来,计算机迅速发展在工业控制领域对顺序控制有着重大意义的一种新兴技术,由于它编程直接,方便,抗干扰能力强,工业控制中几乎所有的顺序控制都可简单地由它完成,因而其应用愈来愈广泛。电动行车是现代化生产中用于物料输送的重要设备,传统的控制方式下,大都采用人工操纵的半自动控制方式,在许多场合,为了提高工作效率,促进生产自动化和减轻劳动强度,往往需要实现电动行车的自动化控制,实现自动化控制,可以使行车能够按照预定顺序和控制要求,自动完成一系列的工作。本文介绍了工厂电镀车间的电镀专用行车,利用PLC构成一套自动控制系统,实现对电镀专用行车的自动控制过程。
1、工作过程分析
电镀专用行车采用远距离控制,起吊重量500kg以下,起重物品是有待进行电镀或表面处理的各种产品零件。根据电镀加工工艺的要求,电镀专用行车的结构和动作流程如图1所示,其中1 槽为电镀槽,槽中装有电镀液,2槽为回收槽,3槽为清水槽,实际生产中电镀槽的数量由电镀工艺要求决定,电镀的种类越多,槽的数量越多。

图1 电镀专用行车的结构和动作流程图
电镀专用行车的工作过程如下:
(1)在电镀生产一侧,工人将待加工的零件装入吊篮,发出控制信号,行车自动上升,并逐段前进,根据工艺要求在需要停留的槽位停止。
(2)行车停留在某个槽位上面后,自动下降,停留一定的时间(各槽停留的时间根据工艺要求预先设定),再自动上升并继续前行。
(3)如此完成电镀工艺规定的各道工序,直至生产的末端。然后,自动返回原位,由工人卸下处理好的零件。 至此,一次循环加工完成,可见,电镀专用行车加工过程的控制是顺序控制,由吊篮前进、下降、延时停留、上升、后退等工序组成。
2、拖动系统设计
专用行车的前后和升降运动由三相交流异步电动机拖动,根据电镀行车的起吊重量,选用两台电动机进行拖动。
主电路拖动控制系统如图2所示,其中,行车的前进和后退,吊钩的上升和下降控制分别通过两台电动机M1、M2的正、反转来控制。
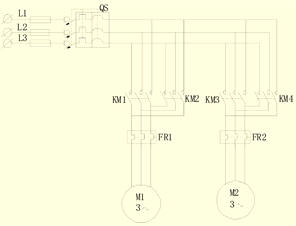
图2 主电路拖动控制系统原理图
图2中,接触器KM1,KM2控制电动机M1的正、反转,实现行车的前进和后退,接触器KM3,KM4控制电动机M2的正、反转,实现吊钩的上升和下降。
3、PLC系统结构设计
3.1 PLC选型及地址分配
根据该专用行车的控制要求,其输入/输出及控制信号共有13 个,其输入信号9个,输出信号4个,实际使用时,系统的输入都为开关控制量,加上10%-15%的余量就可以了,并无其他特殊控制模块的需要,拟采用三菱公司FX2N-24MR型PLC,输入/输出信号地址分配见表1。
表1 输入/输出信号地址分配表

3.2 PLC控制电路设计
图3为电镀专用行车的控制系统I/O端口接线图,需注意的是,图中对输入的常闭触点进行了处理,即常闭触点改用了常开触点。
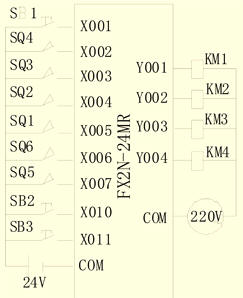
图3 PLC控制系统I/O端口接线图
4、PLC软件设计
4.1 控制系统梯形图编制
根据控制要求和I/O地址编制,绘出控制系统梯形图如图4。

图4 PLC控制系统梯形图
梯形图工作原理分析:
电镀生产线采用专用行车,行车架上装有可升降的吊钩,行车和吊钩各由一台电动机拖动,行车的进/退和吊钩的升/降均由相应的限位开关SQ定位,流程如下:
(1)按启动按钮SB1,X001闭合,状态S0被置位,Y003得电,KM3工作,吊钩提起工件,开始上升,当碰到上限位开关SQ5时停止,X007接通,S0复位,吊钩停止上升,状态S1被置位,M20得电,Y001工作,KM1工作,行车开始向下一道工序前行。
(2)当行车前行至镀槽限位开关SQ1时,X005动作,S1复位,行车停止前行,状态S2被置位,Y004得电,KM4工作,吊钩刚好在镀槽的上方开始下降。
(3)当吊钩下降至下限位开关SQ6时,X006动作,吊钩下降停止,工件浸入镀液槽中,并开始定时。
(4)定时280秒后,状态S3被置位,Y003工作,KM3工作,电镀结束,吊钩提起工件,开始上升,当碰到上限位开关SQ5时停止,X007接通,吊钩停止上升,并在镀槽上方停留28秒,让镀波滴回槽中。
(5)当行车在镀槽上方停留28秒后,状态S4被置位,M20得电,Y001工作,KM1工作,行车继续向下一道工序前行,直到碰压回收波槽限位开关SQ2时,X004动作,状态S5被置位,Y004得电,KM4工作,行车停止前行,并且吊钩刚好在回收波槽的上方开始下降。
(6)当吊钩下降至下限位开关SQ6时,X006动作,吊钩下降停止,工件被放置回收波槽中,并开始定时。
(7)定时30秒后,状态S6被置位,Y003工作,KM3工作,吊钩又开始上升,当碰到上限位开关SQ5时停止,X007接通,吊钩停止上升,并定时停留15秒。
(8)当15秒定时到后,状态S7被置位,M20得电,Y001工作,KM1工作,行车继续向下一道工序前行,直到碰压清水槽限位开关SQ3时,X003动作,行车停止前行,并且在清水槽上方停留15秒。
(9)定时15秒后,状态S8被置位,Y004工作,KM4工作,吊钩开始下降,当吊钩下降至下限位开关SQ6时,X006动作,吊钩下降停止,工件置于清水槽中,并开始定时清洗30秒。
(10)定时清洗30秒后,状态S9被置位,Y003得电,KM3工作,吊钩提起工件,开始上升,当碰到上限位开关SQ5时停止,X007接通,吊钩停止上升,并定时停留15秒。
(11)定时15秒后,状态S10被置位,M21得电,Y002工作,KM2工作,行车开始后退,当后退至原位限位开关SQ4时,X002动作,状态S11被置位,Y004工作,KM4工作,行车停止后退,吊钩开始下降,当吊钩下降至下限位开关SQ6时,X006动作,吊钩下降停止, 镀好的工件被取下来。
(12)按下按钮SB2或SB3,能实现行车的点动进/退控制。
至此,整个电镀生产完成一个工作循环,当再次按下起动按钮SB1时,则开始第二个工作循环。
5、结束语
文中采用PLC对电镀专用行车进行自动控制,简化了电气控制系统的硬件和接线,减小了控制器的体积,提高了控制系统的灵活性,同时,PLC有较完善自诊断和自保护能力,可以增强系统的抗干扰能力,提高系统的可靠性,应用表明,PLC在旧电动行车的自动化改造和新型电动行车的设计中,有广泛的应用前景。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司