
高精度激光直写数字伺服滤波器的设计
发布时间:2016-01-06作者:智汇小新
激光直写技术是一种近年来应用广泛的超精密加工技术。该技术是一种利用强度可变的激光束,在基片表面实施有规则的高精度扫描。在扫描过程中,光刻基片随载物平台而运动。因此影响光刻元件的质量取决于载物平台的定位精度以及运动的稳定性,影响光刻元件的快速性取决于系统的响应度。
基于数字式伺服的运动控制器是超精密定位系统的关键。由于数字伺服滤波器是数字式伺服的运动控制器的核心,从而数字伺服滤波器的设计将影响系统的定位精度。
数字伺服滤波器是指系统的闭环控制与调节采用数字技术,所有控制调节实现软件化。调节器的全部软件化使控制理论中很多控制思想和手段得以应用。同时利用软件很容易完成参数的自由化和故障的自诊断功能,使系统控制性能大大提高,从而克服了模拟型闭环伺服系统对微弱信号的信噪难分离、控制精度难提高、容易受机械摩擦和温度影响,位置环控制产生零点漂移误差等缺点。
1 伺服控制系统结构及分析
1.1 伺服控制系统结构
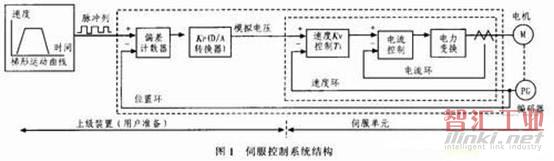
整个伺服控制系统的硬件结构如图1所示。上级装置由DSP处理器和D/A转换模块组成,伺服单元由安川伺服驱动器组成。整个系统是一个闭环伺服电机控制系统。DSP处理器产生梯形运动曲线的数字脉冲信号,通过设计的数字滤波器,直接驱动D/A转换器产生模拟电压,经过伺服单元驱动伺服电机。实际运动中的位置和速度信号由电机反馈给光编码器,并由光电编码器产生数字信号,然后传输给DSP进行采集处理。
1.2 系统分析
该方案的关键是解决电机轴与负载之间的粘性摩擦和外界对电机及变换器的干扰等问题。由于摩擦环和外界干扰的存在,系统的动态及静态性能受到很大程度的影响,主要表现为低速时出现爬行现象,稳态时有较大的静差或出现极限环振荡。为了满足激光直写的要求,系统还必须具有响应速度快、定位时间短,稳态精度高等特点。若启动速度过慢或过冲,停止时间过长,系统则具有很强的振荡,且噪声大。
2 数字滤波器的设计
2.1 数字伺服滤波器模型设计
通过大量实验,对系统进行分析后发现:对位置偏差控制采用PID控制方法可以提高精度和阶跃响应;加入速度和加速度前馈补偿控制方法可以提高系统的稳态精度;加入摩擦补偿可以克服摩擦力的影响。因此,此方案没计是一种既利用位置误差进行闭环控制,又利用给定位置信号进行开环的复合控制系统。

则系统控制输出U(t)=Up(t)+Uva(t)+Uf(t),其中Up(t)为PID控制器,Uva(t)为速度和加速度补偿控制器,Uf(t)为摩擦补偿控制器。
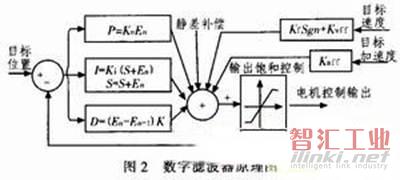
PID伺服滤波器控制规律如图2所示。
图2中Kp为比例增益,Ki为积分增益,Kd为微分增益,Kvff为速度前馈增益,Kaff为加速前馈增益,Kf为粘性摩擦系数,En为位置偏差,Vt为t时刻速度,At为t时刻的加速度,输出的B静态误差主要用于补偿控制轴受重力的影响。对滤波器输出对应的模拟量,由输出的饱和控制器进行限制。
2.2 参数调节
在位置PID调节器中比例增益Kp的大小决定系统的快速性,积分增益Ki的作用是消除系统的静态误差。微分增益Kd的作用是增加阻尼,减少振荡。调节过程是先调节Kp,再调节Ki,然后调节Kd。第1次设定Ki增益时,如果把Ki设定为一非O值将引起突然的“跳跃”。为避免这种情况,需要把积分限(积分部分的饱和控制器)设置为0,Ki设定为期望值,再设置积分限到期望的积分限。这样就清除了所有以前的积分值,从而使积分从前一个点开始平稳运算。接着调节Kvff,Kaff,从而提高系统的稳态精度。最后调节Kf,从而克服摩擦力的影响。
在启动阶段调节Kvff,Kaff过大会使速度过快而导致位置过冲。在减速阶段调节Kvff,Kaff过小,会使定位时间过长。根据最优控制思想,如果系统按照最大加速度启动,最大速度运动,最大减速度制动,就可以以最短时间无超调地达到协调点。因此,参数调节时应按照启动,匀速,减速3个阶段分别设置。
3 MATLAB设计与仿真
3.1 仿真模块设计
根据设计原理,图l中的偏差计数模块就等效为带前馈补偿的PID控制器,并设计成图2中所对应的部分,并且将D/A转换器等效设计成离散的数据通过零阶保持器;将安川伺服驱动器等效速度环和电流环;输出的信号采用仿真示波器进行观察。因此整个伺服三环PID仿真原理如图3所示。
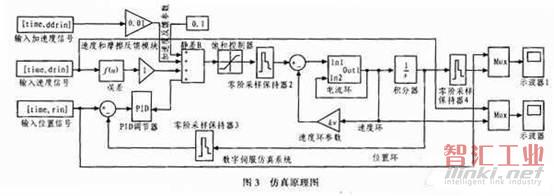
其中,rin(k)为采样K时刻的位置输入信号,为了能模拟实际的效果,将输入的rin(k)设置为不规则的位置信号,此时输入指令为正弦叠加信号;drin(k)为采样K时刻的速度输入信号;ddrin(k)为采样K时刻的加速度输入信号,并且drin(k+1)=(rin(k+1)-rin(k))/ts,ddrin(k+1)=(drin(k+1)-drin(k))/ts。
3.2 仿真波形
对于高精度的激光直写,衡量其性能主要取决于速度的稳定、响应度和位置的精确。因此在图3的仿真中,要根据实际情况,多次调节控制系统参数,并经过分析和对比,从中得到一幅速度稳定、位置精确的跟踪图,其仿真波形如图4所示。
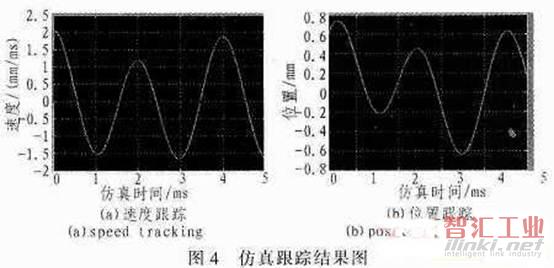
图4(a)为速度跟踪结果,设置的速度和实际的速度重合,速度稳定,稳定控制在0.1%内。在0时刻附近出现了速度突然的“跳跃”,是由于没有调节积分限。因此在实际情况中应先把积分限(饱和控制器)设置为O,Ki设定为期望值,再设置积分限到期望的积分限。
图4(b)为位置跟踪结果,输出的实际位置和设置的目标位置重合。位置定位精确高,精度控制在0.1%内。
仿真结果表明在带有摩擦条件下,位置跟踪没有存在“平顶”现象,速度跟踪没有存在“死区”现象。位置跟踪定位精度高,速度跟踪稳态精度高。
4 软件实现
伺服单元模块由伺服驱动器设计,其参数调节可以在伺服驱动器中设置,详细参考驱动器用户手册。PID数字滤波器+前馈复合控制系统由DSP2812实现。操作流程为:先将PID复合仿真模块的MATLAB语言生成CCS中的C语言,然后移植到CCS软件中,并根据PID控制算式原理结合软件设计流程进行修改。
5 结论
介绍了伺服控制系统结构,针对系统中存在的摩擦环节和实际要求进行分析,然后结合根据控制原理,设计了伺服PID数字滤波器。通过MATLAB仿真验证该数字滤波器速度稳定;位置跟踪误差收敛于零。并从中得到了关于调节控制参数的经验。最终的实际结果表明,整个系统输入与输出时差小于100 Ls;无噪音无振荡;定位精度误差控制±1μm范围内。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司