
串联H桥多电平高压变频器故障处理新方法
发布时间:2018-02-10作者:智汇胡妮
1 引言
矿井提升机是煤矿生产的关键设备,肩负着井上、井下联络的重任,提升机控制系统工作的安全可靠性,直接影响到企业的经济效益[1]。串联h桥的多电平高压变频提升机传动系统,虽然不像重要场合的风机、水泵负载那样要求系统能够连续运转,当变频器功率单元出现故障时可以立即停止提升机运行,进行单元更换、检修处理,待故障排除后继续进行生产,但是当提升机高速运行时,若变频器某一相的一个或几个,甚至多相的多个h桥功率单元同时发生故障时,要求提升机传动系统必须能够继续驱动电动机,以提供足够的制动力矩将提升机制动。因此,提升机传动系统在变频器故障状态下能否继续运行,是值得研究的问题。
目前,国内对串联h桥型变频器故障单元的处理主要有旁路技术、热插拔技术等,这些只是用于对故障单元硬件方面的处理,在控制方式上并没有得到改善。同时存在变频器的输出电压不对称、对操作人员人身安全有一定的危险以及备用h桥单元的投入需要一定的时间。本文主要针对6kv九电平电压空间矢量控制变频器,分析当单元故障时,如何对电压矢量开关状态重新选择,保证串联h桥功率单元故障时,提升机能够提供最大的制动力矩。在matlab/simulink环境下对提升机传动系统进行了故障运行仿真分析。
2 故障运行时逆变器的控制方法
为了使提升机在串联h桥功率单元故障时提供最大制动力矩,并使传动系统输出的电压轨迹接近圆形,需要确定最小的kdx,令此最小值为kdmin,将kdmin所对应的正六边形,作为变频器最大电压矢量幅值的参考。

为了使传动系统输出达到式(2)确定的最大幅值,对开关状态进行调整,调整之后,传动系统输出的三相相电压的相位、幅值都很可能会不对称,但输出的线电压是对称的,电动机仍然可以对称运行。
在传统的故障单元旁路方式中,为保证线电压对称,必须保证相电压是对称的,所以必须将某些正常串联h桥功率单元一同旁路,限制了传动系统的带载能力。与传统的故障单元旁路方式相比,应用svpwm控制技术的开关状态调整方式,在同样的故障状态下,能够输出幅值更大的正弦电压,能够为提升机制动提供更大的力矩。
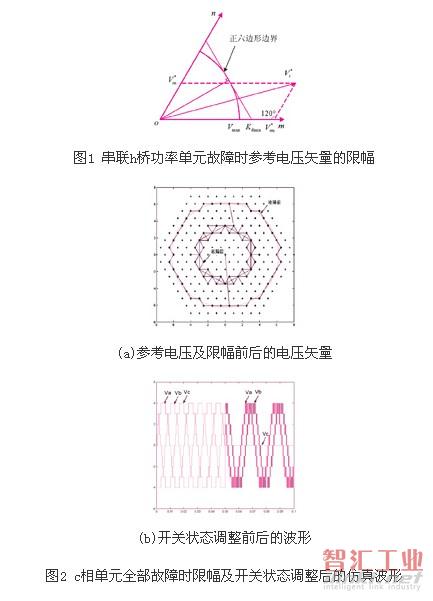
2.1 参考电压矢量限幅
当串联h桥功率单元出现故障时,如果参考电压矢量vr*的幅值大于vmax,那么vr*就无法通过变频器输出实现,此时必须对vr*进行限幅。一种简单可行的方法,就是将vmax作为参考电压矢量的幅值,将矢量vr*的角度作为参考电压矢量的角度。设参考电压矢量vr*在m-n坐标系中的坐标为(vrm*,vm*),如图1所示。根据余弦定理可以计算,参考电压矢量vr*的幅值vr*为:

因此,为了使参考电压矢量为圆形,将其限制在图1用虚线表示的正六边形内切圆上,只需将vr*按比例λ缩短,其中。
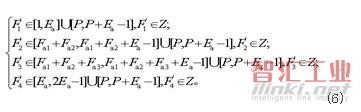
图2中(a)所示为c相串联h桥功率单元全部发生故障时,参考电压及限幅前后传动系统输出的电压矢量分布图。
2.2 开关状态的调整
采用电压空间矢量调制时,根据参考电压矢量确定电压矢量及开关状态[3]。当串联h桥功率单元发生故障后,某些电压矢量已无法通过所选的开关状态来实现,必须对这些开关状态进行调整,调整的原则是使零序电压尽可能保持最小。
例如开关状态(2,1,-3),在c相两个串联h桥功率单元故障的情况下就无法得到,为了使零序电压最小,所以调整开关状态为(3,2,-2),零序电压由0变为3。通过此种调整,归根到底就是通过增加a、b两相的电压来补偿c相无法提供的那部分电压。
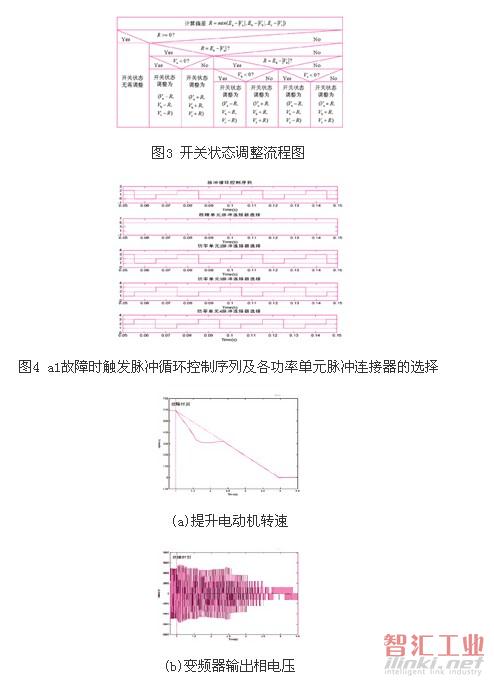
为了增强开关状态(va,vb,vc)调整的自适应能力,在本文的仿真系统中采用实时计算的方式来实现,调整计算的流程图如图3所示。图2中(b)为c相串联h桥功率单元全部发生故障时开关状态调整前后的仿真波形。
2.3 故障运行时的触发脉冲循环控制
串联h桥功率单元发生故障后,触发脉冲的循环必须忽略该故障单元,循环只在正常的串联h桥功率单元之间进行。
在仿真模型中,采用脉冲选择连接器循环选择的方式来实现,a、b、c三相的串联h桥功率单元故障矩阵分别用fa、fb、fc表示,fa、fb、fc均为4×1矩阵,每个矩阵的四个元素对应各相中串联的四个h桥功率单元故障状态,“1”表示单元正常,“0”表示单元故障。例如,a1、a3故障,则fa=[0,1,0,1]t;若b4故障,则fb=[1,1,1,0]t。
由于三相触发脉冲控制方式相同,在此以a相为例进行说明。为方便表述,将fa记为fa=[fa1, fa2, fa3,
fa4]t,因此,ea的计算可以描述为:
ea=fa1+fa2+fa3+fa4 (4)
用f1、f2、f3、f4分别表示四个功率单元的脉冲循环序列初值,与fa各元素的关系为:

初值确定后,还要将触发脉冲循环控制序列进行修正,触发脉冲循环序列由串联h桥功率单元全部正常时的0-1-2-3-0-1-2-3-……,修正为故障状态循环序列0-1-……-(ea-1)-0-1-……-(ea-1)-……。加上初值后,故障状态时的触发脉冲循环控制序列瞬时值f1′、f2′、f3′、f4′取值范围为:
因此可以判断,如果f1′、f2′、f3′、f4′取值大于或者等于p,则说明其对应的功率单元发生故障,将触发脉冲选择至无效端口,用于封锁脉冲输出(仿真模型中设定此时逆变器电压输出为零);如果取值小于p,将f1′、f2′、f3′、f4′分别对ea取余,计算的结果用于连接器选择。图4所示为a1故障时的触发脉冲循环控制序列及各功率单元连接器选择仿真图形。
3 仿真分析
基于simulink对串联h桥九电平提升机变频传动系统进行了仿真,该系统的电动机采用转子磁链定向的矢量控制,变频系统中每个h桥逆变单元采用仿真系统中直流电压单独供电。系统容量的参数选择留有一定裕量,当只有一个功率单元故障是,系统运行不会受到任何影响,所有的串联h桥单元故障都集中发生在某一相时,负载不平衡最为严重,因此,仅对a相四个功率单元发生故障情况作了仿真。
仿真参数设置:仿真系统的电机参数根据yr118/44-10型提升电动机的技术参数进行选取,逆变系统igbt功率模块额定电压2000v,额定电流400a。直流侧电压为vdc=1200v。
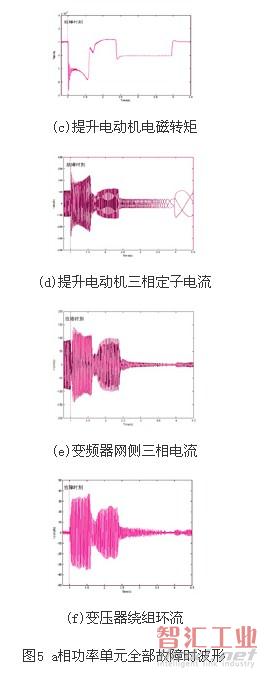
图5为a相的所有串联h桥功率单元都发生故障时的波形。为了将提升机转速给定和实际转速曲线区分得更明显,仿真设定的角加速度为-21rad/s2。从图(c)所示的转矩波形可以看出,由于变频器输出的最大电压降低,提升电动机反向电动势的影响时间比两个串联h桥功率单元故障时要长,待转速降低之后,电磁转矩仍然能控制提升电动机的转速,使之与给定转速吻合。图(e)和(f)所示为变频器网侧三相电流以及输入变压器主绕组的环流,三相电流的不平衡程度加剧,变压器原边绕组环流的峰值增大。
在实际应用中,某一时刻有更多的串联h桥功率单元同时损坏的可能性很小。从上述的波形分析来看,当串联h桥功率单元发生故障时,虽然变压器绕组环流较大,但系统在较大环流下的工作时间很短,采用参考电压限幅以及开关状态调整的控制方式,可以保证提升电动机的安全制动和停机,满足煤矿提升的控制要求。
4 结束语
本章针对串联h桥功率单元故障,分析了单元故障对电压矢量的影响,为了保障传动系统输出三相线电压对称,并且确保传动系统输出的零序电压最小,阐述了参考电压矢量限幅、开关状态调整及触发脉冲循环控制的控制方式。在matlab/simulink搭建了单元故障状态时的控制模型,通过仿真,实现了上述串联h桥功率单元故障的控制方式,系统有较好故障运行能力。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司