
下一代机器人或更柔软!“活性物质”突破使其能够随意变形
发布时间:2022-03-21作者:智汇lucy
物理学家们发现了一种新的方法,可以给软体机器人涂上一层材料,让它们以更有目的性的方式移动和工作。这项研究由英国巴斯大学(University of Bath)领导,已于近期发表在了《科学进展》杂志上。
研究报告的作者认为,他们使用活性物质进行的突破性建模,可能标志着机器人设计的一个转折点。随着这一概念的进一步发展,确定柔软固体的形状、运动和行为可能不是通过其自然弹性,而是通过其表面控制活动。
普通软性材料的表面总是收缩成球体。比如,水珠的出现是因为液体和其他软性物质的表面会自然收缩到尽可能小的表面积——即球体。但活性物质可以设计成能够对抗这一趋势。一个例子是包裹在一层纳米机器人中的橡皮球,通过编程,这些机器人可以协同工作,把这个球变为一个预先确定的新形状。
人们希望,活性物质将带来能自下而上运转的新一代机器。这些新机器不是由中央控制器来控制,而是由许多活性单位制成,这些单位会相互合作,以决定机器的运动和功能。这类似于人体生物组织的运转,如心肌中的纤维。
利用这个想法,科学家们可以设计出柔软的机器,其手臂由柔性材料制成,并由嵌入其表面的机器人提供动力。研究第一作者Jack Binysh博士说,“活性物质使我们以一种新的眼光看待熟悉的自然规则。”
论文的通讯作者Anton Souslov博士补充道,“这项研究是对这个概念的重要证明,有很多有用的启示。例如,未来的技术可能会生产出柔软得多的机器人,它们能更好地拾起和操纵精致的材料。”
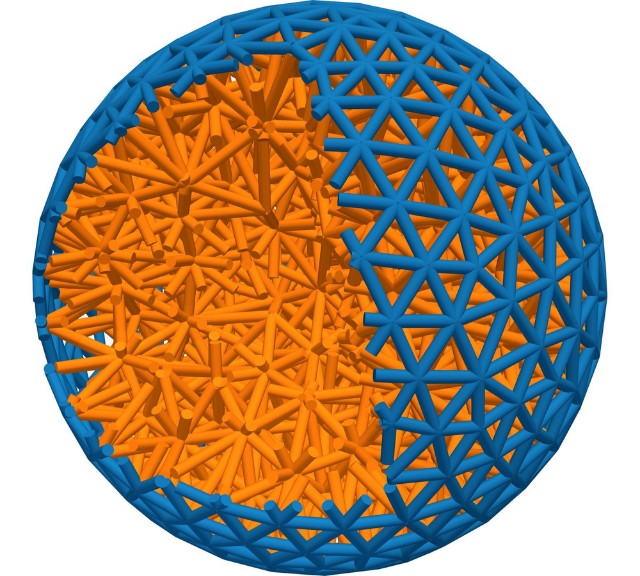
在这项研究中,研究人员开发了理论和模拟以描述一个三维软体,据悉,这个软体表面经历了主动应力。结果他们发现,这些活性应力扩大了材料的表面并把下面的固体也拉了过来,另外还引起了整体形状的变化。研究人员发现,固体所采用的精确形状可以通过改变材料的弹性特性来定制。
接下来,研究人员将应用这一一般原理来设计特定的机器人如软臂或自游泳的材料,实际上他们已经开始这么做了。此外,他们还将开始研究材料的群体行为,如当你拥有许多活性固体并让它们挤在一起时会发生什么。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司