
机器人竟也能3D打印了!上海交大如何一次造出会感知、能行走的完整机器人?|《Science Advances》
发布时间:2025-12-22作者:光光
一个由柔软材料制成、仅手掌大小的六足机器人,正灵巧地在桌面上前进、转弯。它不仅能通过手势遥控,还能在遇到障碍时自主绕开,甚至能感觉到被触摸的位置。更令人惊奇的是,这个集成了传感器、电路和驱动器的复杂机器人主体,是在一台机器上一次性、无需组装打印完成的。
长期以来,制造一个功能完整的软体机器人是一项繁琐的工程:柔软的驱动结构、精密的传感器和刚性的电子电路,通常需要在不同的地方分别制作,再像拼装模型一样小心翼翼地组合起来。这个过程不仅耗时,还容易在软硬材料结合的脆弱界面处产生故障。
最近,上海交大的研究团队在《Science Advances》上发表了一项突破性研究,他们开发了一种集成化的多材料3D打印技术,能够像“一体化成型”那样,自动制造出集驱动、传感、电路和通信功能于一身的自主软体机器人。
这项技术让复杂软体机器人的制造,从精密的手工组装活,变成了高效、可靠的自动化生产过程。
制造困境:为何完整的软体机器人如此难造?
软体机器人因其出色的柔顺性和对复杂环境的适应性,在搜救、检测和人机交互等领域前景广阔。然而,一个能真正自主工作的软体机器人,需要将柔软的驱动结构、各类传感器、供电单元、控制电路和通信模块全部集成在一个有限的空间内。
传统的制造方法,如模具浇铸和手工组装,面临巨大挑战。
首先是工序繁琐。每个部件单独制作,再像“搭积木”一样组装,耗时且精度难以保证。
其次是界面脆弱。刚性电路板与柔软躯体结合处,在机器人反复弯曲变形时,极易因应力集中而开裂或脱落,导致电路失灵。
再就是结构受限。传统方法很难在三维空间中灵活布置电路,限制了机器人内部结构的优化和整体小型化。
如何让“软”的身体和“硬”的电子和谐共处、可靠工作,仍然是核心难题。
技术突破:两种3D打印合二为一,30分钟自动成型
研究团队的解决方案颇具巧思,他们不是发明一种全新的打印技术,而是将两种成熟的3D打印技术数字光处理(DLP)和直接墨水书写(DIW)融为一体,创建了一个集成的制造平台。
DLP技术擅长用光固化树脂,快速成型出结构复杂的柔软主体。DIW技术则像一支精密的“糖霜笔”,可以挤出导电或具有特殊电阻的硅胶“墨水”,从而在机器人内部直接绘制出功能性电路。
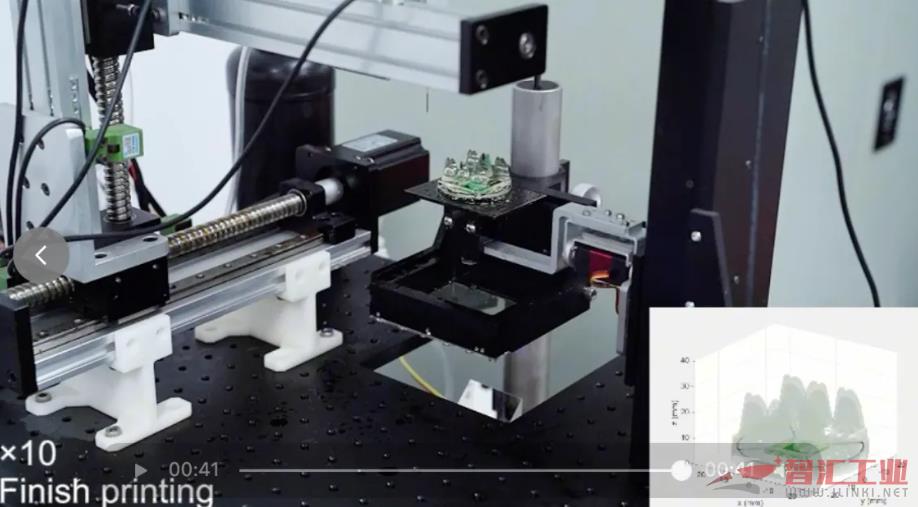
关键在于,团队通过巧妙的流程设计和机械改造,让这两种工艺在同一个制造流程中无缝切换。仅通过四个连贯步骤,即可让一个功能完整的软体机器人从无到有,一次成型:
第一步:打印躯体。先用DLP打印出机器人柔软的躯体骨架,其中已预留好电路通道和放置微型电路板的空间。
第二步:嵌入“心脏”。将平台翻转180°,把微型的控制板、蓝牙模块等电子元件精准放入预留位。
第三步:绘制“神经”。使用DIW技术,将导电硅胶“写入”预留的通道,连接各个电子元件,形成三维分布的柔性电路网络。
第四步:封装完成。再次使用DLP打印一层柔软材料,将所有内部元件封装保护起来,形成最终完整的机器人。
整个过程高度自动化,仅需约30分钟,一个重约120克、功能齐全的软体机器人便一次成型,无需任何后期焊接或组装。

自主软体机器人的功能和集成3D打印
设计巧思:让“软”与“硬”和谐共处的工程智慧
先进的制造工具解决了“造得出”的问题,但要确保机器人在反复弯曲、挤压下仍能可靠工作,则是一场硬仗。为此,团队针对软硬材料结合的痛点,提出了三项被实验验证的创新设计策略:
一是波浪形柔性电路。将传统的直线电路设计成如同弹簧般的双层、波浪形。当机器人躯体弯曲拉伸时,电路可以通过自身的形变来吸收应力,避免被拉断。实际测试表明,采用该设计的电路在机器人躯体经历高达40%的拉伸应变时,依然能保持电气连接畅通无阻。
二是离散化迷你印刷电路板。将一整块刚性电路板分割成多个微型模块,并通过柔性电路连接。这好比将一块易碎的大玻璃,转化为一把嵌入橡胶中的小鹅卵石,从根本上分散了机械应力,让整体结构在剧烈形变下仍保持稳定。
三是能量吸收晶格结构。在关键电子元件周围,用DLP打印出充满孔隙的晶格结构。这种结构像高级运动鞋的泡沫中底一样,能在机器人受到撞击或挤压时,有效吸收和分散冲击力,保护内部脆弱的电子元件。在严苛的45%轴向压缩循环测试中,内嵌于晶格中的LED电路始终保持功能正常。
这些设计共同作用,解决了自主软体机器人长期以来的可靠性瓶颈,让它们能够耐受现实世界中的碰撞和大幅变形。

软硬材料相互作用的设计
功能展示:从手势遥控到自主避障的全能选手
基于这套设计和制造方法诞生的软体机器人,展现出了令人印象深刻的多功能特性。
灵敏的“感知-反馈”系统
机器人集成了一个四分之三圆形的触觉传感器。当它的左侧、前方或右侧被触摸时,内部的柔性电阻电路会发生变化,信号被实时处理并通过蓝牙发送。研究人员甚至开发了一个戴在手指上的柔性遥控器,上面的LED灯会分别亮起红、绿、蓝光,直观地告诉操作者机器人身体的哪个部位被触碰到了,实现了触觉到视觉的反馈。
直观的手势遥控
通过手指上的柔性遥控器,操作者可以自然地用手势控制机器人:手指上抬是前进,下压是后退,左右旋转则对应机器人的左右转弯。这为人机交互提供了一种更直观、更自然的方式。

遥控和触觉到视觉反馈
真正的自主导航能力
更重要的是,这个软体机器人具备了自主决策能力。研究团队为其集成了微型飞行时间传感器和惯性测量单元。在演示中,机器人能够在无人干预的情况下,在设有障碍物和死胡同的迷宫中自主探索、决策并规划路径,成功抵达目标点。这标志着它从一个简单的遥控机器,进化为了一个能适应未知环境的自主智能体。
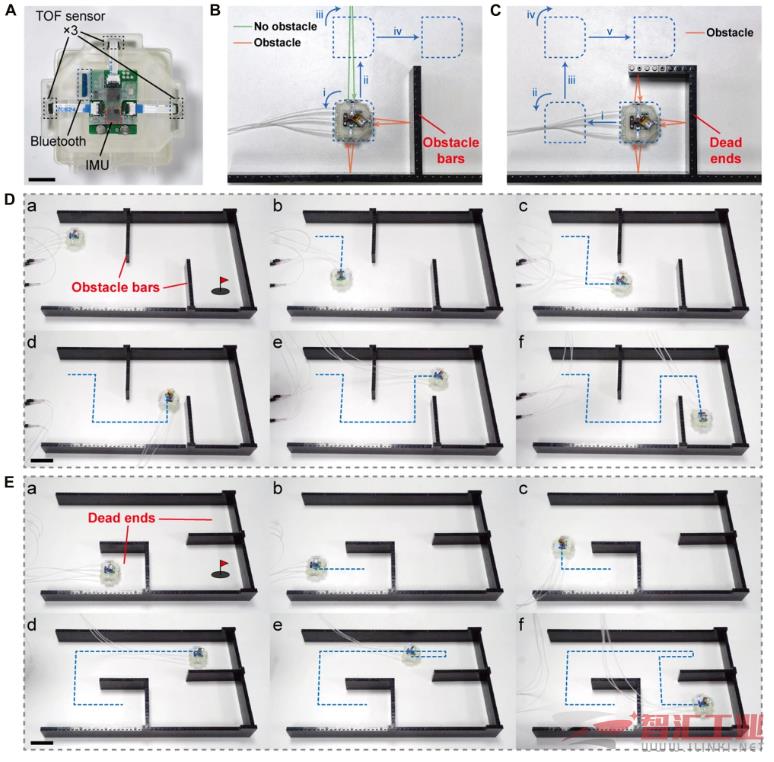
自动导航
未来展望:为下一代软体机器人打开想象空间
这项研究的价值,不仅在于制造出了一个功能出色的机器人原型,更在于它提供了一套通用的设计和制造范式,为开发更复杂、功能更强大的电子集成自主软体机器人铺平了道路。
从精密的“手工活”到高效的“一体化打印”,这项技术正在改变软体机器人的制造逻辑。它让创造那些能深入狭窄缝隙进行搜救、能在人体内安全执行医疗任务、或能在复杂工业设备中自主巡检的柔性智能机器,离现实又近了一大步。

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司