
机器人弹钢琴惊呆了郎朗——如果再配备倍福的 AMP8000,将会如何?
发布时间:2018-08-23作者:德国倍福自动化有限公司
你能听出来这是机器人在弹钢琴吗?
不久前
发生过一件钢琴大师郎朗都相当懵圈的事
那就是机器人竟然也可以弹钢琴了,这不是在抢饭碗吗,为了证明音乐的艺术性,甚至还携其爱徒与拥有"53根"的机器人进行PK ;
最后,不得不对机器人的速度表示佩服,甚至还给出评价:机器人弹得速度很匀,而且没有错音;
那究竟是什么赋予机器人手指如此的魔性
实现如此精准的运动控制呢
答案就是伺服驱动系统
作为现代运动控制领域的核心单元,伺服驱动系统可以实现高精度的传动定位,主要包括伺服驱动器和伺服电机两部分,伺服驱动器接收上位机的指令(速度、位置和力矩),再把上位机指令发给伺服电机,从而实现运动的控制;
这就是伺服驱动系统的工作原理

你是不是以为仅仅这样
伺服控制系统就可以让机器人
弹奏美妙的音乐了
No! No! No!
没那么简单
上面说的只是最简单的运控控制
如果是只让机器人的一根手指活动
这样完全没有问题
但是
如果想要让机器人的53根手指同时活动
这就需要伺服控制系统
同时对多个对象进行控制
从而实现复杂的机械动作
这样,问题就来了
一直以来
伺服驱动器和伺服电机是独立分开的
伺服驱动器放在控制柜里
而伺服电机安装在机器里面
两者之间通过电缆相连接
如果是控制一个运动单元
这种连接方式完全没问题
但是,如果控制多个运动单元
这样互相独立的设计会带来很多不便
比如,在一些较长距离的生产线上,由于伺服电机和驱动器之间的距离又受到限制,采用这样的伺服系统往往需要使用多个控制柜;
所以你看到的是这样的:

或者是这样的
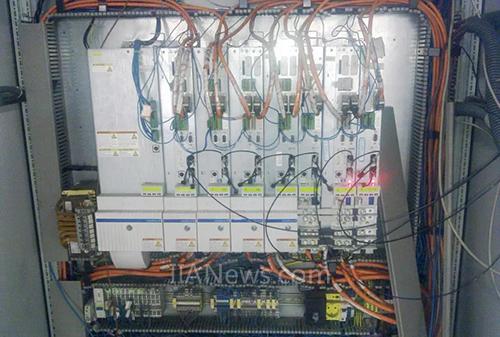
看到如此纷繁复杂的电气柜,谁见了头都得大
of course!
随着技术的进步和用户需求的驱使
一种叫"分布式伺服驱动系统"应运而生!
轻松搞定了以上所有的难题
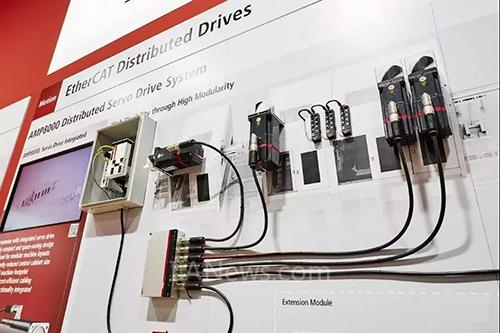
而倍福 AMP8000 分布式伺服驱动系统
就是这样一种"神奇般"的存在
那么,它是如何做到的呢?
首先
采用紧凑的一体化设计
将伺服驱动器直接集成到伺服电机中,伺服电机的尺寸仅仅是延长了7厘米,通过一条通信线即可和上位机相连 ;
所以,驱动器和电机是集成在一起的:

一个典型的分布式伺服驱动系统就成了以下这样的:

这样在控制柜里面就不需要安装驱动器了,只需安装一个耦合器模块,通过一根电缆即可连接到一个分布式接口模块,最终实现连接多台伺服电机的目的;
AMP8000 的每个分布式模块,可控制5台伺服驱动器,而且每个分布式模块还可以往下级联;
因此即使是复杂的机器或产线
也可以用简单的拓扑结构实现
这样,不仅大大减少了控制柜的占用空间
而且解决了产线上因伺服电机太多
或者相隔距离太远而需要多个控制柜的问题
其次
采用倍福独特的 EtherCAT P 单电缆技术
将电机的直流动力电源和运控总线,集成在了一根电缆中;以前信号输送是信号输送,供电是供电,两者要用到两根线缆;
现在用一根电缆,即可同时实现 EtherCAT 信号输送及供电,大大简化了安装过程,电缆布局也因此更加清晰,减少了接线错误,并将控制柜的空间要求降至最低;
所以
你看到实际应用的分布式伺服系统是这样的:
另外
除了实现这些分布式伺服的特点外
TwinSAFE 也将很快集成在 AMP8000 系统中
将安全功能无缝集成到标准控制平台中,如紧急停车、安全门监控、双手操作安全垫监控以及静音,安全位置,安全限速等,实现更复杂的安全功能;
所以,如果你在运动控制方面有以下需求:
a.对空间有严格要求的场合
b.对设备安全有严格要求的场合
c.设备占地面积较大,布局复杂的生产线
不妨尝试一下
倍福的 AMP8000 分布式伺服驱动系统

Copyright © 2015 ilinki.net Inc. All rights reserved. 智汇工业版权所有
电话:010-62314658 邮箱:service@ilinki.net
 主办单位:智汇万联(北京)信息技术有限公司
主办单位:智汇万联(北京)信息技术有限公司