我国软起动技术起步于上世纪80年代早期,目前生产电机启动器的厂家很多,先后也推出了多种品牌的软起动器。但由于国内自主开发和生产的能力相对较弱,对国外产品的依赖还是很严重。在技术上和可靠性上与国外同类产品尚有一定的差距。所以在整个软起动器市场上,占据统治地位的还是国外产品,国内产品所占的份额还是很低。目前市场上生产的软启动器主要以机械式和三相反并联晶闸管方式为主。机械式启动器是目前使用比较广泛的启动方式,但它是有级起动,会产生二次冲击电流,启动电流仍然为标称电流的3~4倍,且有体积大、噪音大、维护费用高、无法适应恶劣环境等诸多弊端。
目前在国外,发达国家的电动机软起动产品主要是固态软起动装置——晶闸管软起动和兼作软起动的变频器。在生产工艺兼有调速要求时,采用变频装置。在没有调速要求使用的场合下,起动负载较轻时一般采用晶闸管软起动。在重载或负载功率特别大的时候,才使用变频软起动。晶闸管软起动装置是发达国家软起动的主流产品,各知名电气公司均有自己晶闸管软起动的品牌,在其功能上又各具特色。例如GE公司生产的ASTAT智能电机软起动器;ABB公司生产的PST、PSTB系列电机软起动器;施耐德公司的ATS46软起动器;德国SIEMENS公司的3RW22SIKOSTART软起动器等等。目前,国外对晶闸管三相交流调压电路的研究己经从对控制电压、控制电机电流的开环、闭环方式,发展到通过建立比较准确实用的数学模型,找到适用于三相交流调压电路电机负载的控制方法,从而使三相交流调压电路电机负载性能更优。另一方面,随着电力电子技术的发展,异步电动机向更加可靠、方便性好、小型化方向发展。
软启动器本质上是一种直流调压装置,用来实现软启动、软停车、实时监测以及各种保护功能。为了保证系统安全可靠地运行,可以充分发挥单片机的强大控制功能,由主控制电路对系统的关键器件和关键参数,例如过压、欠压、过流、过载、等进行实时监控。随着数字直流PWM调压技术的应用,以及采用高性能的单片机作为系统的控制核心,可以使软启动器具有控制快速准确、响应快、运行稳定、可靠等优点。
1、三相异步电动机的起动原理
交流三相异步电动机的传统启动技术,如定子串电阻/电抗器启动、自耦变压器降压启动、星形-三角形降压启动、转子串电阻或频敏变阻器启动等,在交流电动机启动技术发展过程中都有过重要应用。但随着晶闸管技术的发展,三相交流调压软启动器因为具有性能良好、产品多样、电压可连续调节以及转矩或电流可闭环控制等优点,使得电子软启动器得到了深入而广泛的发展,成为软启动市场中的主流产品。
为了研究三相异步电动机的起动时的电压、电流、转矩等变量的关系,进而分析异步电机起动时的电流、起动转矩和所外加电压的关系,就要研究电机的数学模型。对于电动机的软起动而言,多采用基于集中参数等效电路的数学模型。在不改变异步电动机定子绕组中的物理量和异步电机的电磁性能的前提下,经频率和绕组的计算,把异步电动机转子绕组的频率、相数、每相有效串联匝数都归算成和定子绕组一样,即可用归算过的基本方程式推导出异步电动机的等效电路。三相异步电动机的T形稳态等效电路如图1所示:
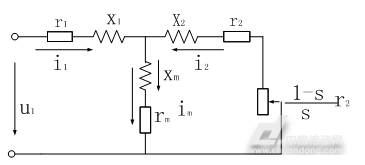
图1 异步电动机的等效电路
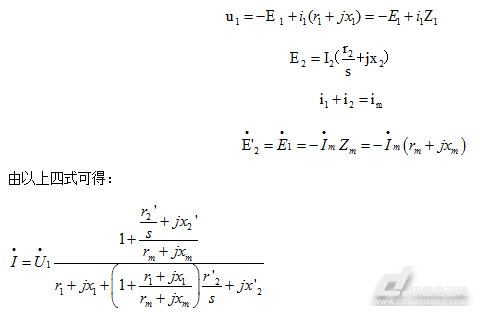
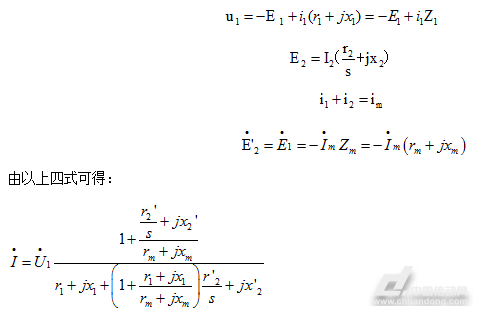
其中,r1为定子绕组的电阻,x1为定子绕组的漏电抗,r2为归算到定子方面的转子绕组的电阻,x2为归算到定子方面的转子绕组的漏抗。rm代表与定子铁心损耗所对应的励磁电阻,xm代表与主磁通相对应的铁心磁路的励磁电抗。U1为定子电压向量,E1为定子感应电动势向量,i1为定子电流向量,im为磁电流向量。基于T形等效电路的数学模型为:
2、软起动的原理及分析
2.1晶闸管调压原理
晶闸管的控制方式有两种:一是相位控制,即通过控制晶闸管的导通角来调压;二是周波控制,即把晶闸管作为静止接触器,交替的接通与切断几个周波的电源电压,用改变接通时间与切断时间之比来控制输出电压的有效值,从而达到调压的目的。但周波控制用在异步电机定子上时,通断交替的频率不能太低,一方面会引起电动机转速的波动,另一方面每次接通电流就相当于一次异步电动机的重起动过程。当电源切断时,电动机气隙中的磁场将由转子中的瞬态电流来维持,并随着转子而旋转,气隙磁场在定子绕组中感应的电动势频率将有所变化,当断流时问隔较长时,这个旋转磁场在定子中感应的电势和重新接通时的电源电压在相位上可能会有很大的差别,这样就会出现较大的电流冲击,可能危及晶闸管的安全。故在异步电动机的调压控制中,晶闸管调压一般采用相位控制。采用相位控制时,输出电压波形已不是正弦波,经分析可知,输出电压不含偶次谐波,奇次谐波中以三次谐波为主要成分。谐波在异步电机中会引起附加损耗,产生转矩脉动等不良影响。此外,由于异步电机是感性负载,从电力电子学中可以知道,当晶闸管交流调压回路带有感性负载时,只有当移相
本系统软起动器采用晶闸管调压原理,通过调节电动机定子输入端电压的大小和相位实现软起动的各种功能。本系统软起动器采用了如图2所示的主电路。用三组反并联晶闸管分别串联在星形接法的电机三相定子线圈上,这种连接方式谐波比较少,调压性能最为优越,控制系统简单、可靠。

图2 软起动主回路原理图
2.2软起动的起动方式
软起动器的功能主要是实现软起动和软停车,而软停车相当于是软起动的逆过程。三相异步电动机软起动器拥有多种起动模式,可以满足不同的起动要求。下面详细介绍:
限流起动就是在电动机的起动过程中限制其起动电流不超过某一设定值Im的软起动方式,起动波形如图3所示。主要用于轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限值Im,然后保持输出电流不大于该值的条件下逐渐升高电压,直到额定电压。这种起动方式的优点是起动电流小,且可按需要调整起动电流的限定值Im。其缺点是在起动时难以知道起动压降,不能充分利用压降空间,损失起动转矩,起动时间相对较长。该方法应用较多,适用于风机,泵类负载。
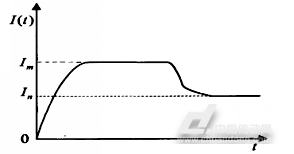
图3 限流启动波形
我国软起动技术起步于上世纪80年代早期,目前生产电机启动器的厂家很多,先后也推出了多种品牌的软起动器。但由于国内自主开发和生产的能力相对较弱,对国外产品的依赖还是很严重。在技术上和可靠性上与国外同类产品尚有一定的差距。所以在整个软起动器市场上,占据统治地位的还是国外产品,国内产品所占的份额还是很低。目前市场上生产的软启动器主要以机械式和三相反并联晶闸管方式为主。机械式启动器是目前使用比较广泛的启动方式,但它是有级起动,会产生二次冲击电流,启动电流仍然为标称电流的3~4倍,且有体积大、噪音大、维护费用高、无法适应恶劣环境等诸多弊端。
目前在国外,发达国家的电动机软起动产品主要是固态软起动装置——晶闸管软起动和兼作软起动的变频器。在生产工艺兼有调速要求时,采用变频装置。在没有调速要求使用的场合下,起动负载较轻时一般采用晶闸管软起动。在重载或负载功率特别大的时候,才使用变频软起动。晶闸管软起动装置是发达国家软起动的主流产品,各知名电气公司均有自己晶闸管软起动的品牌,在其功能上又各具特色。例如GE公司生产的ASTAT智能电机软起动器;ABB公司生产的PST、PSTB系列电机软起动器;施耐德公司的ATS46软起动器;德国SIEMENS公司的3RW22SIKOSTART软起动器等等。目前,国外对晶闸管三相交流调压电路的研究己经从对控制电压、控制电机电流的开环、闭环方式,发展到通过建立比较准确实用的数学模型,找到适用于三相交流调压电路电机负载的控制方法,从而使三相交流调压电路电机负载性能更优。另一方面,随着电力电子技术的发展,异步电动机向更加可靠、方便性好、小型化方向发展。
软启动器本质上是一种直流调压装置,用来实现软启动、软停车、实时监测以及各种保护功能。为了保证系统安全可靠地运行,可以充分发挥单片机的强大控制功能,由主控制电路对系统的关键器件和关键参数,例如过压、欠压、过流、过载、等进行实时监控。随着数字直流PWM调压技术的应用,以及采用高性能的单片机作为系统的控制核心,可以使软启动器具有控制快速准确、响应快、运行稳定、可靠等优点。
1、三相异步电动机的起动原理
交流三相异步电动机的传统启动技术,如定子串电阻/电抗器启动、自耦变压器降压启动、星形-三角形降压启动、转子串电阻或频敏变阻器启动等,在交流电动机启动技术发展过程中都有过重要应用。但随着晶闸管技术的发展,三相交流调压软启动器因为具有性能良好、产品多样、电压可连续调节以及转矩或电流可闭环控制等优点,使得电子软启动器得到了深入而广泛的发展,成为软启动市场中的主流产品。
为了研究三相异步电动机的起动时的电压、电流、转矩等变量的关系,进而分析异步电机起动时的电流、起动转矩和所外加电压的关系,就要研究电机的数学模型。对于电动机的软起动而言,多采用基于集中参数等效电路的数学模型。在不改变异步电动机定子绕组中的物理量和异步电机的电磁性能的前提下,经频率和绕组的计算,把异步电动机转子绕组的频率、相数、每相有效串联匝数都归算成和定子绕组一样,即可用归算过的基本方程式推导出异步电动机的等效电路。三相异步电动机的T形稳态等效电路如图1所示:
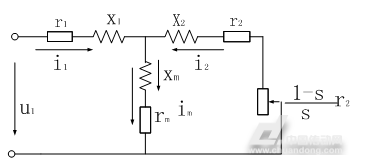
图1 异步电动机的等效电路
其中,r1为定子绕组的电阻,x1为定子绕组的漏电抗,r2为归算到定子方面的转子绕组的电阻,x2为归算到定子方面的转子绕组的漏抗。rm代表与定子铁心损耗所对应的励磁电阻,xm代表与主磁通相对应的铁心磁路的励磁电抗。U1为定子电压向量,E1为定子感应电动势向量,i1为定子电流向量,im为磁电流向量。基于T形等效电路的数学模型为:
2、软起动的原理及分析
2.1晶闸管调压原理
晶闸管的控制方式有两种:一是相位控制,即通过控制晶闸管的导通角来调压;二是周波控制,即把晶闸管作为静止接触器,交替的接通与切断几个周波的电源电压,用改变接通时间与切断时间之比来控制输出电压的有效值,从而达到调压的目的。但周波控制用在异步电机定子上时,通断交替的频率不能太低,一方面会引起电动机转速的波动,另一方面每次接通电流就相当于一次异步电动机的重起动过程。当电源切断时,电动机气隙中的磁场将由转子中的瞬态电流来维持,并随着转子而旋转,气隙磁场在定子绕组中感应的电动势频率将有所变化,当断流时问隔较长时,这个旋转磁场在定子中感应的电势和重新接通时的电源电压在相位上可能会有很大的差别,这样就会出现较大的电流冲击,可能危及晶闸管的安全。故在异步电动机的调压控制中,晶闸管调压一般采用相位控制。采用相位控制时,输出电压波形已不是正弦波,经分析可知,输出电压不含偶次谐波,奇次谐波中以三次谐波为主要成分。谐波在异步电机中会引起附加损耗,产生转矩脉动等不良影响。此外,由于异步电机是感性负载,从电力电子学中可以知道,当晶闸管交流调压回路带有感性负载时,只有当移相
本系统软起动器采用晶闸管调压原理,通过调节电动机定子输入端电压的大小和相位实现软起动的各种功能。本系统软起动器采用了如图2所示的主电路。用三组反并联晶闸管分别串联在星形接法的电机三相定子线圈上,这种连接方式谐波比较少,调压性能最为优越,控制系统简单、可靠。
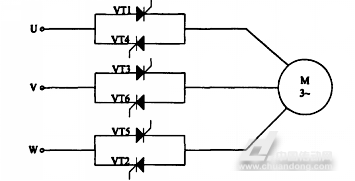
图2 软起动主回路原理图
2.2软起动的起动方式
软起动器的功能主要是实现软起动和软停车,而软停车相当于是软起动的逆过程。三相异步电动机软起动器拥有多种起动模式,可以满足不同的起动要求。下面详细介绍:
限流起动就是在电动机的起动过程中限制其起动电流不超过某一设定值Im的软起动方式,起动波形如图3所示。主要用于轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限值Im,然后保持输出电流不大于该值的条件下逐渐升高电压,直到额定电压。这种起动方式的优点是起动电流小,且可按需要调整起动电流的限定值Im。其缺点是在起动时难以知道起动压降,不能充分利用压降空间,损失起动转矩,起动时间相对较长。该方法应用较多,适用于风机,泵类负载。
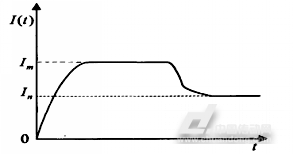
图3 限流启动波形
(审核编辑: 智汇张瑜)



