1 引言
由于可靠性高、抗干扰能力好、接口功能强、使用方便等优点,PLC在工业机器人控制领域中得到了广泛应用。但是PIE无法进行复杂的运算和显示各种实时控制图表,人机交互性差、管理人员不能及时了解现场情况,为弥补PLC这方面的不足,这就需要采用一套PC-PLC监控管理系统。而在该系统中,其最主要的问题便是PC与PLC之间的通信,为此,用VB下的PLC通信开发的工业机器人监控系统
2 系统构成
工业机器人监控系统构成,如图1示。

图1 系统构成
在监控系统中,上位机的主要任务是获取机器人的信息,完成机器人运动在上位机上的实时显示,在机器人出现故障时上位机可控制机器人工作,并及时报警以便尽快修复故障;下位机采用三菱Fx系列PLC,其主要任务是对机器人的运动进行控制,获取和存储机器人的状态信息,发生故障时按上位机命令执行。
3 通信协议
计算机与PLC之问采用主从应答方式,计算机始终具有初始传送优先权,根据需要向PLC发出读写命令;下位机处于被动状态响应上位机的命令。上位机读数据时通过通信口向PLC发出读数据命令,PLC响应命令并将数据传回上位机,上位机通过读通信口即可取的所需数据;写数据时,上位机通过通信口向PLC发出写命令及数据,PLC即可接收。当PLC投能正确响应时,PLC返回投能正确响应标志。此外PIE通信模块还有其它命令代码,上位机发出不同的命令,PLC便能做出相应的响应。
为了使计算机和PLC建立起正确的通信,还必须在PLC的特殊寄存器作相应的设置。D8120用来设置数据长度、校验形式、渡特率和协议方式;D8121用来设置站号,设置范围为O0H—OFH;D8129用来设置校验时间。上位机与PIE的通信协议可有多种格式,在我们设计的工业机器人监控系统中采用的协议格式如下:
(1)计算机从PLC读取数据

(2)计算机向PLC写数据

主要控制字符含义如下: ENQ:计算机的请求信号; ACK:无校验错误,PLC的应答信号; NAK:检查到错误时,PLC的应答信号; SIX:信息帧开始标志; ETX:信息帧结束标志。
4 系统软件设计
4.1 上位机软件设计
由于Visual Basic 6.0是WhMows环境下简单、易学墒效的可视化编程语言开发系统,以其所见所得的可视化界面设计风格和面向对象的程序设计等特点,已广泛地应用于各个领域,是很多计算机软件开发人员开发的工具 VB6.0不但提供了良好的界面设计能力,而且在微机串口通信方面也有很强的
功能,它提供了具有强大功能的通信控件MSConxn。该控件可设置用来发送和接收二进制数据或ASCII码数据,可对串口状态及串口通信的信息格式进行设置,实现对下位机地址和数据的接收和发送,达到多机通信的目的。
MSComm控件有很多重要属性,其中最主要的有:
Cornna Port属性。设置并返回通信端口号;
Settings属性。以字符串的形式设置并返回波特率、奇偶校验、数据位、停止位;
PortOpen属性。设置并返回通信端口的状态,也可打开和关闭端口;
IputLen属性。设置并返回Input每次读出的字符数;
Inputt属性。从接收缓冲区返回和删除字符;
OutPut属性。向传送缓冲区写一个字符串;
InbuferCount属性。接收缓冲区中的字节数。
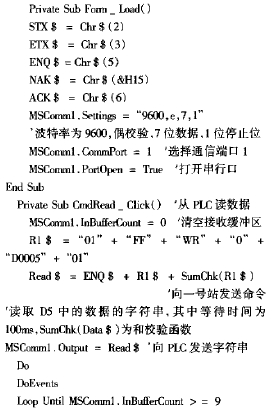
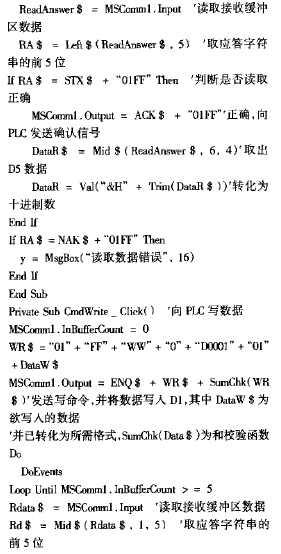
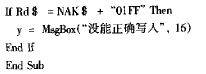
在通信中,采用查询方式,通过lnbm%rCount属性值来判断输入缓冲区是否接收到所需的字符。下面以1 站为例说明计算机同PLC的主要通信程序。
4.2 下位机软件设计
下位机软件,除了控制工业机器人外,还得设置同通信有关的寄存器的参数。1站PLC与通信有关的主要梯形图,如图2示。

图2 PLC通信的梯形囤
5 结论
该监控系统的运行表明,用VB的MSComm控件设计的实时通信软件可靠、稳定,能很好地满足在任务比较简单时的监控系统的要求。
(审核编辑: 智汇李)



