1 异步电动机转矩的产生原理
异步电动机和直流电动机不一样,其旋转磁场或磁通虽然也是由外部三相交流电源提供,但影响因素很多,例如,电压、负载变化都会影响磁通,用简单的U/f 恒定控制在动态环境下(例如,起动、制动、负载突变)是不可能绝对保持磁通恒定。
为此,出现了一种矢量控制方法,即把矢量形式的定子电流I1分解为两种成分,一种是为建立磁通称为励磁成分,另一种是产生转矩称为转矩成分,而且可以分别独立地进行控制。矢量控制的实质是动态控制U员、f,使椎m在静、动态时均绝对保持恒定,最终达到电动机转矩精密可控的目的。
图1 为基于矢量控制的概念,把异步电动机产生转矩的原理与直流电动机作比较。图1(a)为直流电动机励磁绕组产生磁通的原理图,若从电刷方向来看电枢,可见励磁绕组轴与电枢绕组轴是直交的。若励磁磁通的方向为椎,电枢电流的方向为Ia,则根据法拉第左手定律可确定电枢绕组的受力方向为F,亦即电动机产生的转矩为
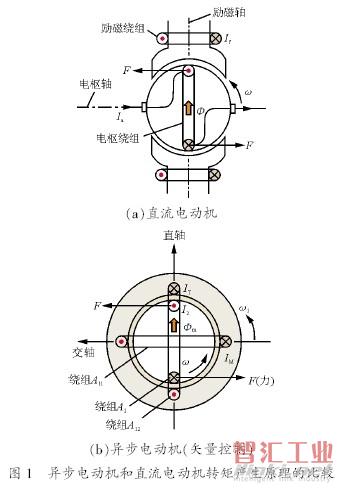
Lm为电枢绕组与励磁绕组间互感。
图1(b)为矢量控制的异步电动机转矩产生的原理示意图。图中,定子绕组上加了三相交流电压,则绕组中将流过三相交流电流,根据“物理电磁学”原理,三相交流电流将产生合成的旋转磁

以上就是把异步电动机与直流电动机作对比,考虑的基于矢量控制的异步电动机转矩产生的原理。
这样,若从定子旋转磁场坐标系来看,则认为该坐标轴上有两个固定的(集中的)相互直交的两个绕组,其中分别流过电流IM 和IT;并认为IM 是产生旋转磁场磁通椎m的励磁电流成分,IT则为产生转矩的并在定子侧反映出的转矩电流成分,它与转子电流I22对应。
在矢量控制中,由于励磁电流IM设定为恒值,磁通椎m与旋转磁场的速度无关,而IT是变化的,则转矩将和IT成比例关系并可自由调节。
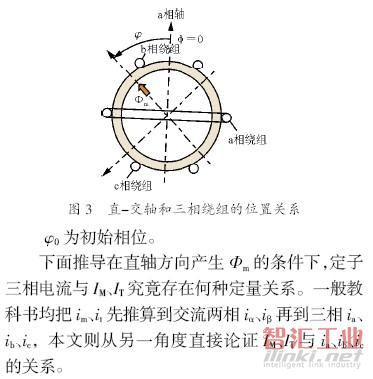
2 与定子三相电流对应的IT和IM


该公式与用传统MT/琢茁/abc 计算方法所得出的结论是一致的,但避开了交流三相/二相变换和矩阵公式运算。
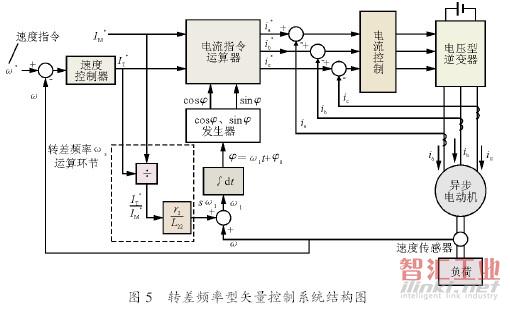
3 转差频率型矢量控制变频调速系统
既然异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,经过相应的坐标反变换,就能够控制异步电动机了。由于进行坐标变换的是电流(代表磁势)的空间矢量,所以通过坐标变换实现的控制系统就叫做矢量控制系统(VectorControl System),简称VC 系统。
4 检测电机转速的转差频率型矢量控制变频调速系统
(审核编辑: 智汇小新)



