数字化与工业 4.0 中最具有创新性的发展就是实现了人类与机器人的合作。几年前看起来还像是异想天开的想法,如今已经取得了极大进展。
然而,这种更像是未来世界的工作,同时又向我们提出了许多问题:人类与机器人之间的协作到底如何进行?工业 4.0 是否能够与人体工学兼容?
机器人同事你也可以有
亚琛工业大学的工业工程及人因研究所(IAW)的助理研究员 Henning Petruck 专注于人机协作研究——一种人与机器人毫无障碍地配合工作的合作形式。
Petruck 是德国研究基金会(DFG)资助的“生产互联网”精英集群项目中的研究生,他正在使用基于 item 工作台系统专门设计的工作间,来研究如何利用机器人使组装人员的工作更轻松。
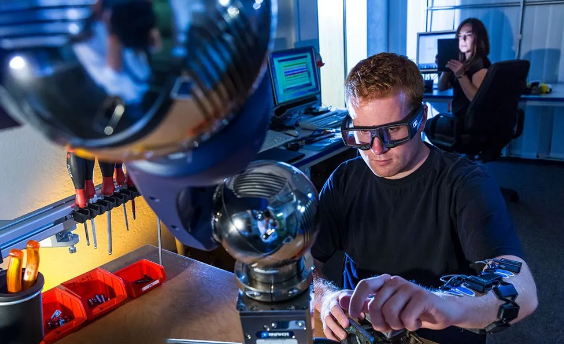
灵活的、符合人体工学的工作协同组装工作间(CoWorkAs)的基本理念是让机械手臂向工人传递零部件和工具,从而实现以与机器人物理接触为核心的真正的人机协作。
“工人可以专注于生产过程,用不着再去四处寻找需要的零部件,只需要做好手里的组装工作,”Petruck 解释说。
一个框架结构带四根立柱与高度可调的工作台和材料供应与拾取系统,就能实现这一目标。还有两个位于头顶上方的线性轴连接机械手臂。

除了机械手臂,整个工作间都是 item 的产品,包括工具和监控器支架等扩展配件。项目管理团队在最初选择供应商时,人体工学发挥了关键作用。“在展会上与 item 讨论后,他们为我们设计出一套方案。我们非常喜欢这种灵活的、模块化的、高度可调的方案,”Petruck 说。整个工作间连接在一起,可以完全根据使用者的身高调节高度。而且,模块化的设计意味着可以不断扩展。
时间精确的人机协作
机械手臂拾取物品并向工人移动,距离越靠近,移动速度越慢,以免意外碰撞。并且,机器人在到达人类同事之前完全停止,这一点很重要,以便确保工人的感受是放松的,是伸手去取物品,而不是物品突兀地伸向自己。
“对于某些与机器人一同工作的人而言,这是一种全新的体验——特别是在我们的设置中,机器人不是固定在一个地方,有着很大的移动范围。”Petruck 强调说。

任何人机协作都会带来一个关键的技术挑战——如何准确预测人类行为。就 CoWorkAs 而言,组装过程中的活动检测被用来分析工人完成组装步骤所需要的时间。
一旦系统检测到首次运行,算法就会计算出计划时间与实际用时之间的差异。“这一差异可以用于准确预测下一组装步骤的时长,这是确保机械手臂可以在正确的时间传递零部件的基础,”Petruck 解释说。过早传递会引起工人不必要的紧张,机器人也无法进行其他工作。
数据保护和进一步研究
这类人机协作不存在任何数据保护担忧,因为不需要保存用户文档。算法只需要很少的细节来适应当前用户。需要的只是一次运行。
此外,后续研究将着眼于人类对机械手臂的控制。这与大学研究团队的另一名成员的工作相关,该团队为只有头部能移动的截瘫患者开发出了一套控制系统。借助安装在头部的加速器,截瘫患者通过头部动作就能控制机器人。CoWorkAs 会将这些实验提升到更高水平。
这也是我们所期待的,任何技术的发展,必定是为人类生活带来更多的便利。
Your ideas are worth it! 期待更多的人可以用 item 的产品实现自己的想象!
(审核编辑: KEEP)



