中科新松有限公司在第一代协作机器人的设计和研发中整合了Elmo的终极多轴运动控制解决方案
采用了Elmo独一无二的、高级的伺服驱动技术,一个在中国机器人和自动化领域领先的公司刚刚完成第一代人机协作的工厂自动化机器人的自主研发。Elmo提供了超小型、功能强大的基于网络型的伺服驱动器,这些驱动器直接安装在关节上。这也证明了Elmo驱动器在诸多方面具有优势,如效率、坚固程度、省空间、最少电缆用量、低EMI指数和整个系统可靠性的提升。在设计制造复杂的7轴协作机器人的时候,使用双闭环控制和采用高分辨率绝对值编码器获得最优伺服性能只是众多挑战中的一部分。Elmo在高端机器人领域里的应用实例可以作为客户在研发过程中追求最高多轴运动控制性能时的指导性参考。
Elmo解决方案
伺服驱动器
Elmo体积超小且功能强大的EtherCAT总线型Gold系列伺服驱动器被用来完成这项挑战任务。这些伺服驱动器直接安装在机器人关节上,这对维持机器人的小体积和紧凑性无疑是个完美的选择。两个功率强大的超小型伺服驱动器Gold SOLO GUITER用来驱动两个基础关节,基础关节支撑整个机器人的机械结构。50A持续和100A峰值的电流输出能力使得高速、高加减速成为可能。五个迷你型Gold SOLO WHISTLE伺服驱动器可以输出持续20A和峰值40A电流,用来驱动另外五个关节。系统里的每个驱动器都可以在高速和高加减速下运行,并且在低速运行时仍保持运动精准。使用同一个驱动器能实现反差比较大的高低速运行得益于1:2000的动态电流范围和非常高的带宽响应。一个驱动器物理尺寸足够小到能直接安装在机器人关节上,几乎是这种复杂机器人项目的唯一选择。把驱动器放置在离编码器反馈足够近的地方可以节省电缆,减少干扰影响,获得比较低的EMI和RFI指标,系统稳定性大大提升。
Elmo应用工具
Elmo高级且易用的配置工具,EASII软件,可以帮助客户调试网络中的每个轴,达到最优的伺服性能。系统辨识、合适的控制器设计、使用高阶滤波器克服机械系统缺陷等只是这个工具的一部分功能,可以提升系统获得最优伺服性能。此外,使用带特殊位置分组增益的简单、高级的系统辨识方法进行多轴系统辨识可以消除不同轴之间的交叉影响。
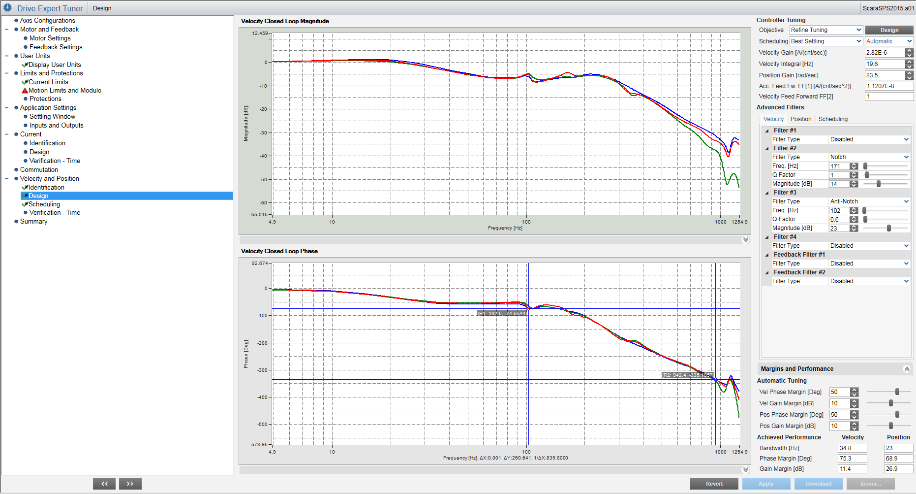
在这个应用中还用到其他具有特色的功能,最终目标是获得最高带宽、最快的响应时间,同时保证机器人运行稳定、平滑,并且具有很高的裕度。
白金版Maestro,终极多轴运动控制器
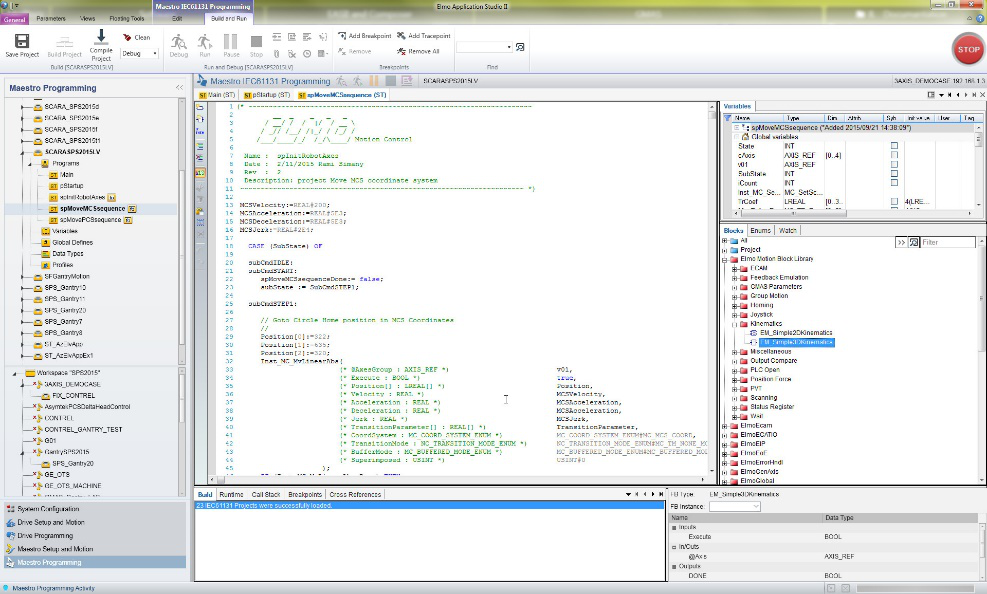
Elmo的高级多轴运动控制器P-MAS可以提供内容丰富的机器人运动学功能,例如Cartesian, SCARA,3-Link,Delta等等,使用这些功能就可以很容易应对机器人应用的挑战。
内置的运动学功能支持MCS(机器坐标系)和PCS(产品坐标系),在翻转、传送和其他外部装置中可以实现完全同步。
此外,P-MAS为客户应用预留了一个实时内核。这部分内核允许机器人开发用户编写自己特殊的运动学转换方程,这一功能使得P-MAS支持任何高端的机器人,几乎不受类型限制,因为客户可以针对应用编写自己的运动学功能。


对于这种在250us总线循环时间内完成机器人运动学正逆解计算的应用必须使用基于四核强大处理器的多轴运动控制器P-MAS。
运动学方程解算是在用户实时应用程中进行的,计算系统中所有轴的目标位置、目标速度或扭矩并在每个EtherCAT总线周期输出。
机器人工作在两种模式,第一种是示教模式,第二种是工作模式。
在示教模式下,操作人员可以沿着需要的工作路径移动机器人手臂到一些关键位置点上,在移动过程中多轴运动控制器记录下相关的位置点以便在工作模式下复现工作路径。
在示教模式下伺服驱动器是运行在同步循环力矩模式。除了目标力矩命令外,多轴运动控制器还会输出额外的补偿力矩去克服重力、机器人动力学等阻抗因素,维持拖拽过程平滑。
这种复杂机器人解决方案的亮点之一就是整个示教过程对一个不会编程的操作人员来说十分简单,大部分工作不需要具有编程经验或技巧就可以完成。
第二种操作模式就是正常工作模式,在这种模式下多轴控制器根据机器人的运动学模型来计算七个轴的目标位置和速度(DH矩阵逆解),如果必要的话,基于机器人动力学模型的补偿力矩会被加到总的输出力矩中。伺服驱动器是工作在循环同步位置模式或者循环同步速度模式,接收目标位置/速度命令和力矩偏置命令。
方案亮点
● 无可匹敌的伺服驱动器性能
● 可以做到250us内16个轴完全同步和坐标运动
● 小体积、高功率的伺服驱动器直接安装在关节上
● 很大的动态电流范围适于高速和高精度
● 双闭环控制性能
● 支持多种反馈(增量式编码器和绝对值编码器)
● 使用性能强大的多轴控制器实现同步和机器人运动学计算
● 快速、实时的EtherCAT总线网络
● 最优的伺服驱动器性能—高带宽带来的就是快速的响应时间
● 功能强大的EASII软件使机器人的配置和实施变得很容易
● 最高效率和极致的稳定性
● 坚固耐用,驱动器可以安装在任何位置
● 很低的EMI和RFI指数
总结
对于中科新松有限公司最新一代科技产品协作机器人来说,Elmo的智能、小体积和简单易用的伺服和运动控制解决方案大大提升了其产品的性能,并且增强了产品的功能性。
(审核编辑: 智汇小瑜)



