-
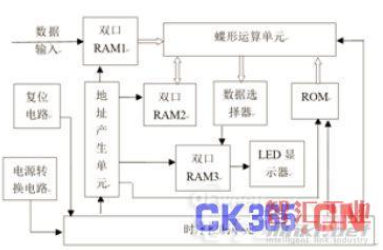
随着集成电路的飞速发展,在图像处理,通信和多媒体等很多领域中,数字信号处理技术已经被广泛应用。快速傅立叶变换(FFT)算法的提出,使得数字信号处理的运算时间上面缩短了好几个数量级。因此对FFT 算法及其实现方法的研究具有很强的理论和现实意义。 [详情]
-

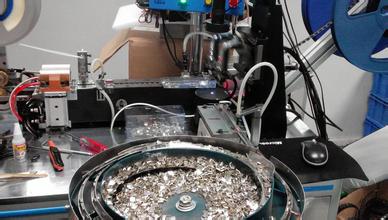
激光加工是激光应用最有发展前途的领域,国外已开发出20多种激光加工技术。作为20世纪科学技术发展的主要标志和现代信息社会光电子技术的支柱之一,激光技术和激光产业的发展受到世界先进国家的高度重视。 [详情]
-

自从1879年美国的T.A.爱迪生制成碳化纤维白炽灯以来,白炽灯已经伴随人们走过了一百多年,至今在一些地区依然是照明的主力。为什么,白炽灯能够长久不衰?低廉的价格起到决定性作用。而LED之所以还未能全面进入普通大众消费者手中也是其价格是许多人还不能承受。 [详情]
-

随着LED显示屏的应用日益广泛,各种LED显示屏厂家如雨后春笋般的冒出来,生产的LED显示屏价格也是高低不同,有些LED显示屏生产厂家的价格相差有时候会很大。 [详情]
-
-
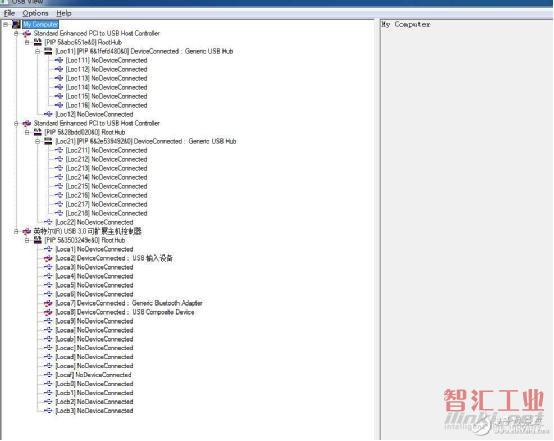
你是否想过为什么电脑上的USB 口可以接键盘 鼠标等等,而你的手机上面的USB 却不可以?你是否想过电脑上的USB口可以接多少USB设备?你是否想过为啥 主板上面的USB口 比起前面板的USB口要好用且稳定?你是否想过为啥同样PCIE转USB的板卡,为啥有的很贵 有的很便宜。 [详情]
-
现在,工程师都开始使用传感器来检测和测量心率、汗液、温度、睡眠、生殖健康,卡路里、GPS坐标、血压、UV紫外线和葡萄糖水平。 [详情]
-

本系统可满足最大量程为7m,测量误差在毫米量级的非接触式液位计,如微波雷达液位计、导波雷达液位计和超声波液位计的检测需求,填补了国内检测机构高精度非接触式液位计检测装置的空白。 [详情]
-
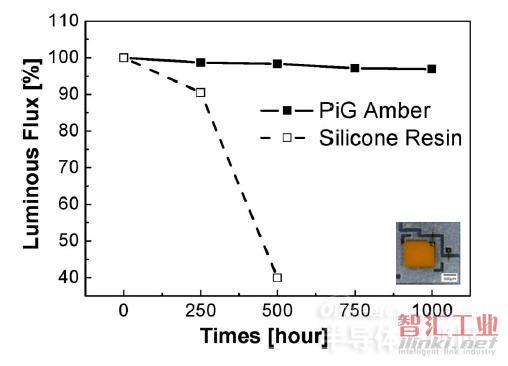
LED因其节能、环保和安全等优势,已经在普通照明和背光市场得到广泛应用,并向品质和性能要求更高的车用领域渗透,目前LED相关产品已能应用于车头灯、昼行灯、方向灯、尾灯、车内灯等等。 [详情]
-

机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时间的积累。 [详情]
-
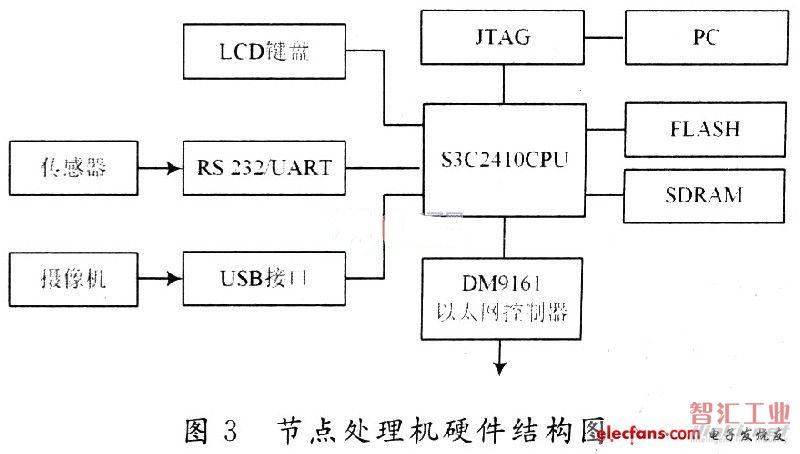
数据的采集、处理以及传输是实现智能小区控制作用的核心。在此设计了利用嵌入式系统作为开发平台,利用TCP/IP协议作为信息传输方式的业主基本信息数据采集的方案。 [详情]
-
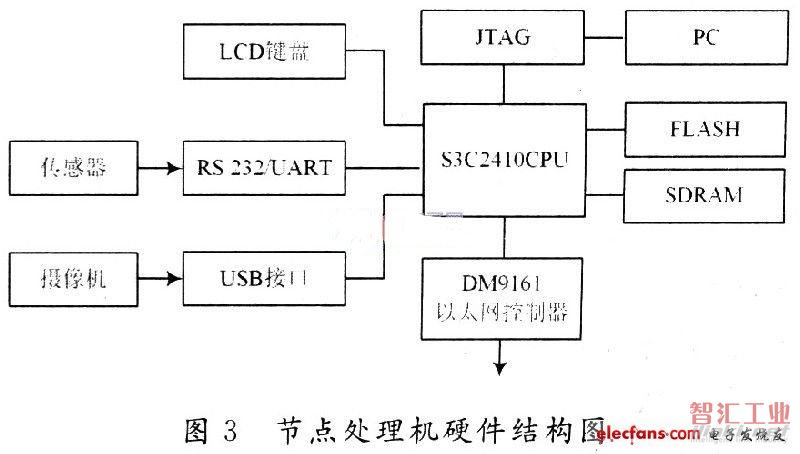
数据的采集、处理以及传输是实现智能小区控制作用的核心。在此设计了利用嵌入式系统作为开发平台,利用TCP/IP协议作为信息传输方式的业主基本信息数据采集的方案。 [详情]
-

传统可见光摄像机在超低照度、高清视频、智能分析、透雾技术等方面已发展到了比较成熟的阶段,基于可见光监控原理,传统可见光摄像机在恶劣气候(如大雾、雨雪等)、无光照还有超远距离等使用环境下仍然无法满足部分特殊行业的需求。 [详情]
-

本田申请了一个“奇怪”的无线充电专利,而之所以说它奇怪,是因为它在设计上很像有轨电车,让人脑洞大开。那究竟是怎样的专利呢? [详情]