近年来德国率先提出"工业4.0"概念,美国推行"先进制造伙伴关系"计划,日本实施"智慧制造系统",而中国也提出了"中国制造2025规划",这些都指向同一个目标,那就是希望通过先进的IT与自动化技术来促进制造业的革新,以实现"智能化",提升效率,降低成本。
而要实现这个目标工业机器人是不可或缺的一环。
1、工业机器人的发展背景 从1920年,"Robot"这个词被捷克剧作家创造出来,到现在机器人已经发展了近百年,从最初的单纯用于搬运的工业机器人,到第二代具有视觉传感器以及信息处理技术的工业机器人,再到目前正在研究的"智能机器人",工业机器人的发展及应用日新月异。

▲工业机器人发展史,点击放大看
2、工业机器人的应用场景 在短短50多年的时间中,机器人技术得到了迅速的发展,在众多制造业领域中,工业机器人应用最广泛的领域是汽车及汽车零部件制造业,并且正在不断地向其他领域拓展,如机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、木材与家具制造业等领域中。 在工业生产中,焊接机器人、磨抛加工机器人、焊接机器人、激光加工机器人、喷涂机器人、搬运机器人、真空机器人等工业机器人都已被大量采用。 1.磨抛加工机器人
磨抛加工机器人主要应用于航空、航海、核电叶片磨抛,采用机器人持砂带在叶片表面磨抛,采用柔性接触、视觉定位的方式减小磨抛缺陷。
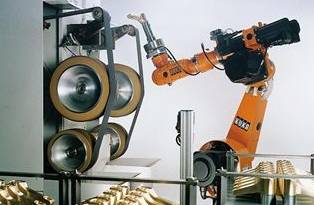
与人工磨抛相比,具有加工时间短,型面精度高,表面粗糙度小,加工一致性好的特点。能适应大负载,恶劣的工作环境。精度要求高。
2.焊接机器人
弧焊机器人主要应用于各类汽车零部件的焊接生产,主要有熔化极焊接作业和非熔化极焊接作业两种类型。

在该领域,国际大型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。应用特点:要求快速平稳移动,定位精度要求较高。
3.激光加工机器人
激光加工机器人是将机器人技术应用于激光加工中,通过高精度工业机器人实现更加柔性的激光加工作业。

通过对加工工件的自动检测,产生加工件的模型,继而生成加工曲线,也可以利用CAD数据直接加工。可用于工件的激光表面处理、打孔、焊接和模具修复等。精度要求较高。
4.真空机器人
真空机器人是一种在真空环境下工作的机器人,主要应用于半导体工业中,实现晶圆在真空腔室内的传输。

真空机械手难进口、受限制、用量大、通用性强,其成为制约了半导体装备整机的研发进度和整机产品竞争力的关键部件。精度要求较高。
5.喷涂机器人
喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。

喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。喷涂机器人所处工作环境恶劣,其精度要求较低。
6.搬运机器人
搬运机器人由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,它可广泛应用于各行业的柔性搬运、传输等功能,也用于自动化立体仓库、柔性加工系统、柔性装配系统;
同时可在车站、机场、邮局的物品分捡中作为运输工具。其负载大,无严格精度要求。
3、工业机器人分类 工业机器人按不同的方法可分下述类型:具体看下图! 4、工业机器人性能评判指标 表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。 ▲工业机器人性能评判指标 1.工作空间(Work space)

工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。
2.运动自由度
运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。机器人的自由度数目越多,功能就越强。
3.有效负载(Payload)
有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。
机器人在不同位姿时,允许的最大可搬运质量是不同的,因此机器人的额定可搬运质量是指其臂杆在工作空间中任意位姿时腕关节端部都能搬运的最大质量。
4.动精度(Accuracy)
机器人机械系统的精度主要涉及位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等。
位姿精度是指指令位姿和从同一方向接近该指令位姿时的实到位姿中心之间的偏差。重复位姿精度是指对同指令位姿从同一方向重复响应n次后实到位姿的不一致程度。
轨迹精度是指机器人机械接口从同一方向n次跟随指令轨迹的接近程度。轨迹重复精度是指对一给定轨迹在同方向跟随n次后实到轨迹之间的不一致程度。
5.运动特性(Sped)
速度和加速度是表明机器人运动特性的主要指标。在机器人说明书中,通常提供了主要运动自由度的最大稳定速度,但在实际应用中单纯考虑最大稳定速度是不够的,还应注意其最大允许加速度。
6.动态特性
动态特性结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
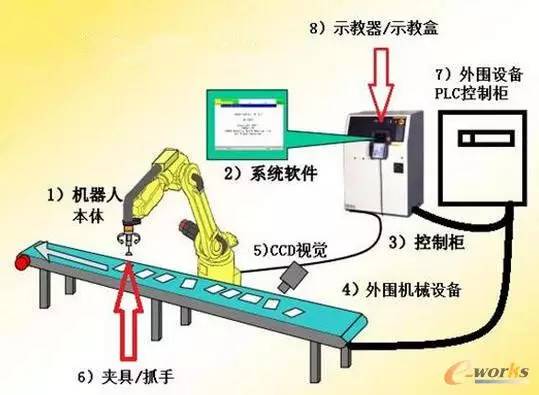
5、工业机器人全方位解读 1.我国的工业机器人现状 工业机器人之所以能在中国市场异军突起: · 首先是因为在成本上,机器人通常仅为人工成本的四分之一; · 其次,机器人在质量、效率、管理等方面还能带来很多新的附加值。 所以,在机器人技术快速提升、价格大幅下降、人工短缺、人力成本上升等因素的综合作用下,中国的工业机器人产业正处于一个井喷时代。 2.工业机器人的关键技术 工业机器人由3大部分6个子系统组成。3大部分是机械部分、传感部分和控制部分。6个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机互系统和控制系统。 机器人关键基础部件主要分成以下三部分:高精度减速机,高性能交直流伺服电机和驱动器,高性能控制器等。机器人性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。 3.工业机器人面临的技术挑战 虽然机器人技术在近几年取得了非常大的进步,但我们要清醒地看到中国工业机器人产业发展面临的巨大挑战。 ▲工业机器人设备 由于关键零部件受国外技术垄断,国产机器人并不具备显著成本优势。同时,大量机器人的生产厂商存在低端锁定的风险。另外,机器人研发、制造与应用之间缺乏有效衔接。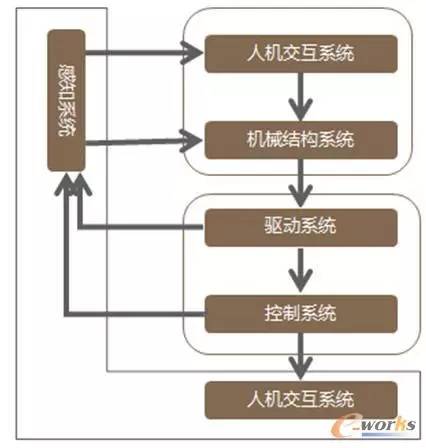
6、工业机器人国内外知名厂商
工业机器人技术水平日趋成熟,已经成为一种标准设备而得到工业界广泛应用,从而也形成了一批较有影响力的、著名的工业机器人公司。其主要分为日系和欧美系,日系中主要有FANUC、安川、松下、不二越、川崎、爱普生等公司; 欧美系中主要有德国的KUKA、瑞典的ABB、瑞士的史陶比尔、意大利的COMAU公司。在国内,工业机器人产业刚刚起步,但增长的势头非常强劲,如新松、安徽埃夫特。
ABB机器人
1988年创立于欧洲的ABB公司于1994年进入中国,1995年成立ABB中国有限公司。

2005年起,ABB机器人的生产、研发、工程中心都开始转移到中国,可见国际机器人巨头对中国市场的重视。目前,中国已经成为ABB全球第一大市场。
松下
唐山松下产业机器有限公司是一家中日合资企业,年产值10亿元,专注于中国焊接市场,为中国用户提供高性能的电焊机、机器人和激光焊接系统。

唐山松下的机器人焊接电源融合式控制器,体现了全数字焊接电源在机器人弧焊技术领域的先进技术水平,得到了国内广大用户认可。
新松(SIASUN)
新松机器人成立于2000年,其机器人产品线涵盖工业机器人、洁净(真空)机器人、移动机器人、特种机器人及智能服务机器人五大系列。

公司以近150亿的市值成为沈阳最大的企业,是国际上机器人产品线最全厂商之一,也是国内机器人产业的领导企业。
(审核编辑: 智汇小瑜)



