-
本文提出了一种以工控机为支撑平台,利用智能运动控制器对多轴联动进行位控的开放式闭环数控系统。介绍了该系统的功能,硬件和软件设计方法。实践证明,基于智能运动控制器的数控系统完全可以实现较高精度的实时控制,而且具有开放性,可实现对多轴联动的开环和闭环控制。 [详情]
-
本文针对开放式数控系统的软件和硬件等特点及其功能要求,采用固高必司)运动控制器,基于面向对象的软件开发过程,提出了一种适用于NC嵌入PC型的开放式数控软件系统框架模型。建立了系统模型的用例图、时序图以及类图,描述了系统的功能要求及实现流程、视图与功能模块的对应交互关系等,提高了开放式数控软件系统开发的质量和效率。并利用VC++编程语言实现了该开放式数控软件系统的界面。 [详情]
-
根据飞阳数控系统及Xpower伺服驱动器的工作原理及特点,阐述了XPOWEIk驱动系统的电流环、速度环和位置环的作用及相互关系,总结了伺服轴的调试优化方法。实践证明该方法可以有效地提高机床的动态性能。 [详情]
-
数控系统是数控机床装备的核心关键部件。特别是对于国防工业急需的高档数控机床,高档数控系统是决定机床装备的性能、功能、可靠性和成本的关键因素,而国外对我国至今仍封锁限制,成为制约我国高档数控机床发展的瓶颈。 [详情]
-

MasterCAM是美国CNC Software公司开发的基于Pc平台的CAD/CAM软件。目前在欧美等发达国家和我国沿海地区应用广泛,其应用领域主要集中在模具制造业,它在CAD方面,提供了多种造型功能,不仅有完备的二维、三维线框造型,而且有多种实用的曲面造型功能及扩展的标准几何图形的造型功能。[详情]
-

航空工业用材料的特点是要求质量轻,在高温和低温条件下,比强度高、综合性能好、化学稳定性好。[详情]
-

计算机辅助工艺规划(CAPP)是连接计算机辅助设计(CAD)和计算机辅助制造(CAM)之间的桥梁。一个好的工艺方案除了方案可行之外,还要求优化配置其所涉及的各种制造资源(包括机床、刀具、夹具和量具等)。[详情]
-
PLC是数控机床的控制中心,机床很多执行机构的动作都是通过PLC控制指令实现的。介绍了实现数控机床安全控制功能的设计思路和设计要点,即通过修改数控机床的PMC程序设置机床自动运行的限制条件.为数控机床增加了防错功能,有效消除了因操作人员的失误导致机床与夹具、工件发生碰撞的隐患,大大提高了机床使用的安全性。[详情]
-

在工作台间工件搬移机械手结构分析的基础上。重点介绍了基于西门子S7—200PLC机械手控制系统的组成,详细叙述了对机械手软硬件控制的实现方法。[详情]
-
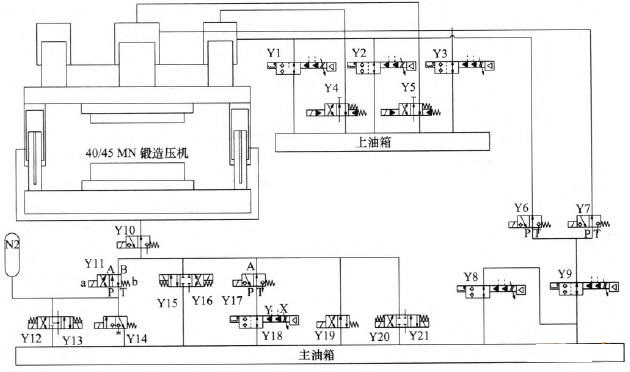
快速锻造压机由于滑块运动速度高,阀组切换快速且频繁,具有速度快、锻件精度高及自动化程度高等特点。该文介绍了45 MN快速锻造压机的液压系统的设计,系统主要采用高频响比例插装阀构成,并进行了较全面的快锻PLC控制方案设计,通过STEP7软件配置硬件组态和编程。该系统已应用于实际生产,完全满足工艺要求,表明PLC快锻控制方案可以达到液压系统的要求。[详情]
-
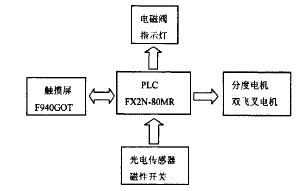
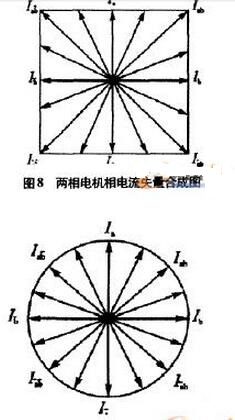
本文踪国际绕线机技术发展趋势,利用交流伺服电机作为绕线及分度的动力,再配合PLC和彩色液晶显示屏,实现绕线工艺柔性化、用户操作简单、修改工艺参数更方便、生产效率更高。[详情]
-

本文对一种工业应用及可用于教学实践的五自由度气动机械手的组成、特点、动作顺序及其气动回路、控制回路进行了研究,为同类设计提供参考。[详情]
-
本文针对现有针布机控制系统,提出一种利用可编程控制器PLC控制执行元件的方案。该方案选用OMRON公司生产的CPM2A型PLC作为控制系统的核心,采用气缸和步进电机作为执行元件,摒弃了传统的凸轮结构。在本文中给出了控制系统硬件组成,程序流程图和输入,输出接线图。可编程控制器PLC替代了继电器逻辑控制系统,提高了自动针布机控制系统的可靠性和稳定性。[详情]
-
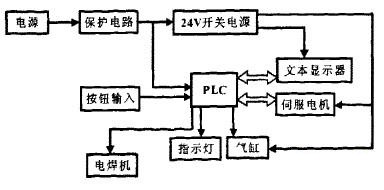
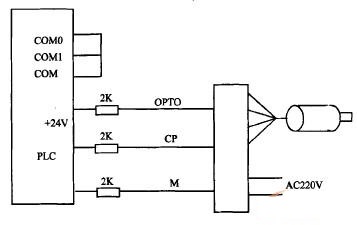
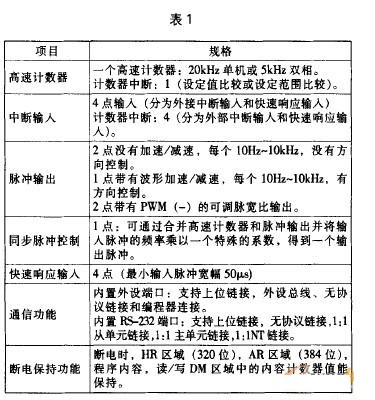
本文介绍基于PLC控裁的伺服电机系统褒密封垫圈绕制串的应用,阐述了密封垫圈绕制系统中PLC控翩的设计,讨论了系统硬件和软件设计,包括电气线路设计、软件编程设计、文本通讯、PLC控制伺服电机定位和电焊机工作的设计。[详情]
-
本文介绍了采用小型PLC、触摸屏、步进系统组成剪床的数控系统,并提供了在应用中所遇到的硬件接口数据及软件流程等。[详情]



